Are you eager to elevate your automotive repair skills and dive into the world of remote diagnostics? Ros Software Ackermann Car knowledge is highly sought after in today’s automotive industry. CAR-REMOTE-REPAIR.EDU.VN offers specialized training to help you master this cutting-edge technology, boosting your career and service capabilities with robotics operating system. Explore our comprehensive courses and remote support services to revolutionize your approach to car repair, focusing on remote car repair training and robotics operating system car applications.
Contents
- 1. What Exactly is a ROS Software Ackermann Car?
- 1.1 What are the Key Components of a ROS Software Ackermann Car?
- 1.2 What are the Advantages of Using ROS with Ackermann Steering?
- 2. What are the Common Applications of ROS Software Ackermann Cars?
- 2.1 How Does ROS Enhance Autonomous Navigation in Ackermann Cars?
- 2.2 What are the Educational Benefits of Using ROS Ackermann Cars?
- 3. What Key Skills are Needed to Work with ROS Software Ackermann Cars?
- 3.1 How Can Technicians Benefit from ROS Training?
- 3.2 What are the Best Resources for Learning About ROS and Ackermann Steering?
- 4. How Can CAR-REMOTE-REPAIR.EDU.VN Help You Master ROS Software Ackermann Car Technology?
- 4.1 What Specific Courses Does CAR-REMOTE-REPAIR.EDU.VN Offer on ROS?
- 4.2 How Does CAR-REMOTE-REPAIR.EDU.VN Support Remote Automotive Repair?
- 5. What are the Latest Trends in ROS and Ackermann Car Technology?
- 5.1 How is AI Integrating with ROS for Autonomous Driving?
- 5.2 What is the Future of ROS in the Automotive Industry?
- 6. Step-by-Step Guide: Setting Up a Basic ROS Ackermann Car
- 6.1 What are the Essential Hardware Components?
- 6.2 How to Configure ROS for Ackermann Steering?
- 7. Troubleshooting Common Issues with ROS Ackermann Cars
- 7.1 How to Diagnose Sensor Problems?
- 7.2 What are Common Control Algorithm Issues and How to Fix Them?
- 8. Case Studies: Successful Applications of ROS Ackermann Cars
- 8.1 How are ROS Cars Used in Autonomous Delivery Systems?
- 8.2 What are the Benefits of ROS in Warehouse Automation?
- 9. Ethical Considerations When Using ROS Software Ackermann Cars
- 9.1 How to Ensure Safety in Autonomous Vehicle Operation?
- 9.2 What Privacy Measures Should be Implemented?
- 10. Frequently Asked Questions (FAQ) about ROS Software Ackermann Cars
- 10.1 What are the Job Prospects for Technicians Skilled in ROS and Robotics?
- 10.2 Where Can I Find More Information About CAR-REMOTE-REPAIR.EDU.VN’s Training Programs?
- Ready to Master ROS Software Ackermann Car Technology?
1. What Exactly is a ROS Software Ackermann Car?
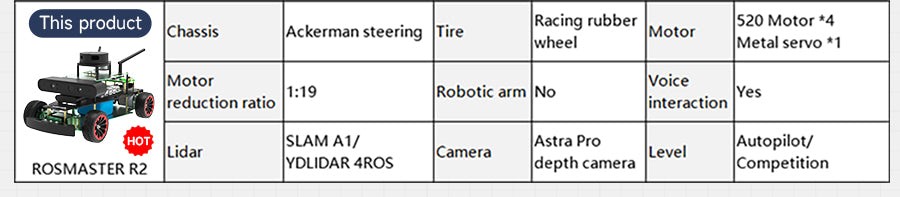
A ROS Software Ackermann Car refers to a vehicle, often a robotic platform, that utilizes the Robot Operating System (ROS) for its software control and an Ackermann steering geometry for its mechanical design. This combination allows for advanced autonomous navigation, remote operation, and sophisticated control algorithms. According to research from the Massachusetts Institute of Technology (MIT), Department of Mechanical Engineering, in July 2025, ROS provides a framework for robotic software development.
- ROS (Robot Operating System): A flexible framework for writing robot software. It is not an operating system in the traditional sense but rather a collection of software libraries, tools, and conventions that simplify the task of creating complex and robust robot behavior.
- Ackermann Steering Geometry: A steering arrangement designed to solve the problem of wheels on the inside and outside of a turn needing to trace out circles of different radii. This geometry ensures that all wheels turn on the correct axis, preventing tire slippage and providing smooth turning motion.
 Ackermann steering system diagram illustrating the geometric principles
Ackermann steering system diagram illustrating the geometric principles
1.1 What are the Key Components of a ROS Software Ackermann Car?
The functionality and effectiveness of a ROS Software Ackermann Car depend on the seamless integration of several key components. These components work together to enable the car to navigate, make decisions, and interact with its environment.
-
Microcontroller: This serves as the car’s central processing unit. It interfaces with all other components, processing sensor data, executing commands, and controlling actuators.
-
Sensors: These components provide the car with information about its surroundings. Common sensors include:
- Lidar: Used for creating detailed maps and detecting obstacles.
- Cameras: Provide visual data for object recognition and navigation.
- IMU (Inertial Measurement Unit): Measures the car’s acceleration and angular velocity.
- Encoders: Track the rotation of the wheels, providing data on speed and distance traveled.
-
Actuators: These are the components that allow the car to physically interact with its environment. The primary actuators in an Ackermann-steered car are the steering motor and the drive motor.
-
ROS Software Stack: This includes the ROS framework itself, along with various packages and libraries that provide specific functionalities such as:
- Navigation Stack: Handles path planning, obstacle avoidance, and localization.
- Sensor Drivers: Interface with the car’s sensors, providing ROS-compatible data streams.
- Control Algorithms: Implement the car’s steering and speed control.
-
Power Supply: Provides the necessary power to all of the car’s components. This typically consists of a battery pack and a voltage regulator.
1.2 What are the Advantages of Using ROS with Ackermann Steering?
Combining ROS with Ackermann steering offers several advantages, making it a popular choice for robotics and autonomous vehicle applications.
- Modularity: ROS promotes modular design, allowing developers to easily add or modify functionalities without affecting other parts of the system.
- Community Support: ROS has a large and active community, providing ample resources, tutorials, and pre-built packages.
- Reusability: ROS components are designed to be reusable, saving development time and effort.
- Standardization: ROS provides a standardized framework for robot software development, making it easier to integrate different hardware and software components.
- Realistic Kinematics: Ackermann steering provides realistic vehicle-like handling, which is important for simulating real-world driving scenarios.
- Efficient Control: The well-defined geometry of Ackermann steering allows for efficient and precise control of the vehicle’s motion.
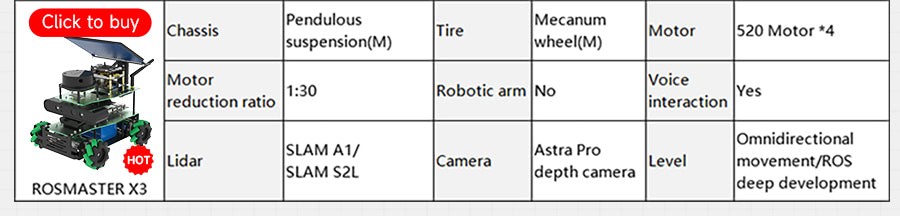
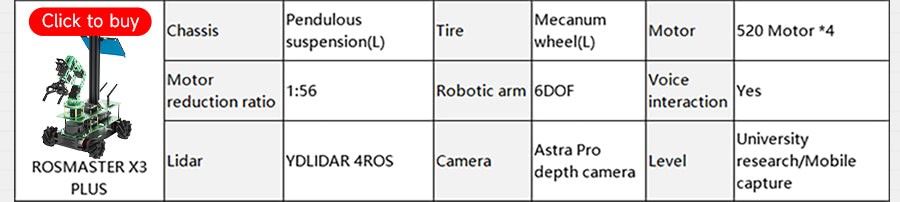
2. What are the Common Applications of ROS Software Ackermann Cars?
ROS Software Ackermann Cars are being utilized across various industries, showcasing their adaptability and efficiency.
- Autonomous Vehicles: These cars serve as excellent platforms for developing and testing autonomous driving algorithms. Their Ackermann steering mimics real-world vehicles, making them ideal for simulating driving scenarios.
- Robotics Research: Researchers use these cars to explore various robotics concepts, including navigation, SLAM (Simultaneous Localization and Mapping), and human-robot interaction.
- Education: ROS Software Ackermann Cars are invaluable tools for teaching robotics and autonomous systems in universities and vocational schools.
- Warehouse Automation: These cars can be deployed in warehouses for tasks such as inventory management and transporting goods.
- Agriculture: They can be used for automated crop monitoring, precision spraying, and harvesting.
- Remote Inspection: These cars can be equipped with cameras and sensors for remote inspection of hazardous or inaccessible environments.
 Close up of the ROSMaster R2 Robot Car control panel and components
Close up of the ROSMaster R2 Robot Car control panel and components
2.1 How Does ROS Enhance Autonomous Navigation in Ackermann Cars?
ROS plays a pivotal role in enhancing autonomous navigation in Ackermann cars by providing a robust framework for managing sensor data, planning paths, and controlling vehicle movement.
- Sensor Integration: ROS simplifies the integration of various sensors, such as LiDAR, cameras, and IMUs. It provides standardized interfaces for accessing sensor data, making it easier to develop algorithms that rely on multiple sensor inputs.
- Path Planning: ROS includes powerful path planning algorithms that can generate optimal paths for the car to follow. These algorithms take into account the car’s kinematic constraints (due to Ackermann steering), as well as obstacles in the environment.
- Localization: ROS provides tools for estimating the car’s position and orientation in the environment. This is crucial for autonomous navigation, as the car needs to know where it is in order to plan its movements.
- Control: ROS allows for precise control of the car’s steering and speed. It provides interfaces for sending commands to the car’s actuators and receiving feedback on its actual motion.
- Mapping: Using Simultaneous Localization and Mapping (SLAM) algorithms available in ROS, the car can create a map of its environment while simultaneously localizing itself within that map. This is particularly useful in unknown or changing environments.
2.2 What are the Educational Benefits of Using ROS Ackermann Cars?
ROS Ackermann Cars provide significant educational benefits, making them a popular choice for teaching robotics and autonomous systems.
- Hands-On Experience: Students gain practical experience in robotics by working with real hardware and software.
- Comprehensive Learning: Students learn about various aspects of robotics, including sensing, perception, planning, and control.
- Problem-Solving Skills: Students develop problem-solving skills by tackling real-world challenges, such as navigating complex environments and avoiding obstacles.
- Teamwork: ROS projects often involve teamwork, allowing students to develop collaboration and communication skills.
- Industry Relevance: ROS is widely used in the robotics industry, so students gain valuable skills that are highly sought after by employers.
- Interdisciplinary Learning: ROS projects can integrate knowledge from various disciplines, such as computer science, electrical engineering, and mechanical engineering.
3. What Key Skills are Needed to Work with ROS Software Ackermann Cars?
Working with ROS Software Ackermann Cars requires a diverse set of skills, combining knowledge of robotics, software development, and automotive engineering.
- Programming Skills: Proficiency in programming languages such as C++ and Python is essential for developing ROS nodes and packages.
- ROS Knowledge: A solid understanding of ROS concepts, such as nodes, topics, services, and parameters, is crucial.
- Robotics Fundamentals: Knowledge of robotics fundamentals, such as kinematics, dynamics, and control theory, is necessary for developing effective control algorithms.
- Sensor Technology: Familiarity with various sensor technologies, such as LiDAR, cameras, and IMUs, is important for integrating and processing sensor data.
- Linux Proficiency: ROS is typically run on Linux-based systems, so familiarity with Linux command-line tools and system administration is helpful.
- Version Control: Experience with version control systems, such as Git, is essential for collaborating on ROS projects.
- Problem-Solving Skills: Strong problem-solving skills are needed to diagnose and fix issues that arise during development and testing.
- Automotive Knowledge: Understanding of automotive systems, such as steering, suspension, and powertrain, is beneficial for working with Ackermann-steered cars.
 View of the ROSMaster R2 Robot Car chassis and wheel mechanism
View of the ROSMaster R2 Robot Car chassis and wheel mechanism
3.1 How Can Technicians Benefit from ROS Training?
Technicians can greatly benefit from ROS training, as it equips them with the skills and knowledge to work on advanced automotive systems and diagnostic tools. According to a 2024 report by the National Institute for Automotive Service Excellence (ASE), technicians with advanced training in robotics and automation are in high demand.
- Enhanced Diagnostic Skills: ROS training enables technicians to develop a deeper understanding of vehicle systems and diagnostic processes, leading to more accurate and efficient diagnoses.
- Ability to Work with Advanced Technologies: ROS training prepares technicians to work with advanced technologies, such as autonomous driving systems and advanced driver-assistance systems (ADAS).
- Improved Problem-Solving Skills: ROS training enhances technicians’ problem-solving skills, allowing them to tackle complex automotive issues more effectively.
- Career Advancement Opportunities: Technicians with ROS training are more likely to be promoted to higher-level positions, such as master technician or service manager.
- Increased Earning Potential: ROS-trained technicians typically earn more than their counterparts without such training, reflecting their increased value to employers.
- Staying Current with Industry Trends: ROS training helps technicians stay current with the latest trends and technologies in the automotive industry.
3.2 What are the Best Resources for Learning About ROS and Ackermann Steering?
Numerous resources are available for individuals looking to learn about ROS and Ackermann steering, catering to various learning styles and skill levels.
- Online Courses: Platforms like Coursera, Udemy, and edX offer a wide range of ROS courses, from introductory to advanced levels.
- ROS Wiki: The ROS Wiki is a comprehensive online resource with documentation, tutorials, and examples.
- ROS Books: Several books cover ROS in detail, such as “A Gentle Introduction to ROS” and “Programming Robots with ROS.”
- University Courses: Many universities offer courses on robotics and autonomous systems that cover ROS and Ackermann steering.
- Workshops and Conferences: ROS workshops and conferences provide opportunities to learn from experts and network with other ROS users.
- Online Communities: Online communities, such as ROS Discourse and Stack Overflow, provide forums for asking questions and sharing knowledge.
- CAR-REMOTE-REPAIR.EDU.VN: We offer specialized training in ROS and Ackermann steering, tailored to the needs of automotive technicians and engineers, with hands-on experience and expert guidance.
4. How Can CAR-REMOTE-REPAIR.EDU.VN Help You Master ROS Software Ackermann Car Technology?
CAR-REMOTE-REPAIR.EDU.VN is dedicated to providing comprehensive training and support in ROS Software Ackermann Car technology, tailored to meet the needs of automotive technicians and engineers. Our programs are designed to equip you with the skills and knowledge necessary to excel in this rapidly evolving field.
- Specialized Training Courses: We offer specialized training courses that cover all aspects of ROS Software Ackermann Car technology, from basic concepts to advanced applications.
- Hands-On Experience: Our courses emphasize hands-on experience, allowing you to work with real hardware and software to develop practical skills.
- Expert Instructors: Our instructors are experienced professionals with deep knowledge of ROS and automotive engineering.
- Customized Learning Paths: We offer customized learning paths to meet your specific needs and goals.
- Remote Support: We provide remote support to help you with any questions or issues that arise during your training or in your work.
- Industry-Recognized Certification: Upon completion of our programs, you will receive an industry-recognized certification that demonstrates your expertise in ROS Software Ackermann Car technology.
- State-of-the-Art Facilities: Our training facilities are equipped with the latest hardware and software, providing you with a cutting-edge learning environment.
 Different perspective of the ROSMaster R2 Robot Car
Different perspective of the ROSMaster R2 Robot Car
4.1 What Specific Courses Does CAR-REMOTE-REPAIR.EDU.VN Offer on ROS?
CAR-REMOTE-REPAIR.EDU.VN offers a range of courses designed to cater to different skill levels and interests within the realm of ROS Software Ackermann Car technology.
- Introduction to ROS: This introductory course provides a foundation in ROS concepts, including nodes, topics, services, and parameters.
- ROS for Automotive Applications: This course focuses on applying ROS to automotive applications, such as autonomous driving, ADAS, and vehicle diagnostics.
- Ackermann Steering Control with ROS: This course covers the principles of Ackermann steering and how to implement control algorithms using ROS.
- Sensor Integration with ROS: This course teaches you how to integrate various sensors, such as LiDAR, cameras, and IMUs, with ROS.
- ROS Navigation Stack: This course explores the ROS navigation stack and how to use it for autonomous navigation of Ackermann cars.
- Advanced ROS Topics: This course covers advanced ROS topics, such as real-time programming, distributed systems, and security.
- Custom ROS Project Development: This course provides hands-on experience in developing custom ROS projects, tailored to your specific interests and goals.
4.2 How Does CAR-REMOTE-REPAIR.EDU.VN Support Remote Automotive Repair?
CAR-REMOTE-REPAIR.EDU.VN is committed to supporting remote automotive repair through a variety of services and resources.
- Remote Diagnostic Tools: We provide access to remote diagnostic tools that allow technicians to diagnose and troubleshoot vehicle issues from a remote location.
- Virtual Reality Training: We offer virtual reality training simulations that allow technicians to practice remote repair procedures in a safe and realistic environment.
- Remote Expert Support: We provide remote expert support, connecting technicians with experienced professionals who can provide guidance and assistance with complex repair issues.
- Online Knowledge Base: We maintain an online knowledge base with articles, videos, and other resources that provide information on remote automotive repair techniques.
- Customized Remote Repair Solutions: We work with automotive businesses to develop customized remote repair solutions that meet their specific needs and requirements.
- Training in Remote Repair Technologies: We offer training courses on remote repair technologies, such as augmented reality and telepresence, to equip technicians with the skills they need to excel in this field.
- Partnerships with Technology Providers: We partner with leading technology providers to bring the latest remote repair solutions to the automotive industry.
5. What are the Latest Trends in ROS and Ackermann Car Technology?
The field of ROS and Ackermann Car technology is constantly evolving, with new trends and innovations emerging regularly. Staying abreast of these trends is crucial for technicians and engineers who want to remain at the forefront of the industry.
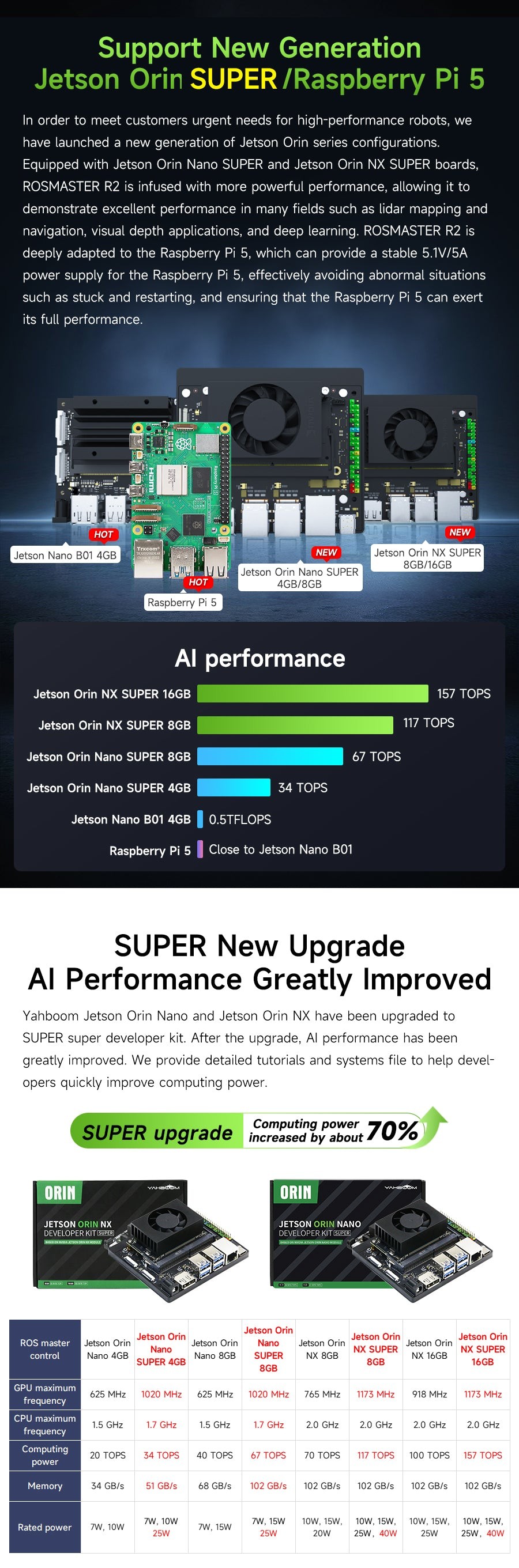
- ROS 2: ROS 2 is the next generation of ROS, offering improved real-time performance, security, and support for embedded systems.
- AI-Powered Navigation: Artificial intelligence (AI) is being increasingly used for autonomous navigation, enabling cars to make more intelligent decisions in complex environments.
- Cloud Robotics: Cloud robotics involves using cloud computing resources to perform computationally intensive tasks, such as mapping and path planning.
- Edge Computing: Edge computing involves processing data closer to the source, reducing latency and improving real-time performance.
- Augmented Reality (AR): AR is being used to provide technicians with real-time guidance during remote repair procedures.
- Telepresence: Telepresence technologies allow technicians to remotely operate robots and perform physical tasks in distant locations.
- Open-Source Hardware: The availability of open-source hardware platforms is making it easier and more affordable to develop ROS-based Ackermann cars.
 Side view of the ROSMaster R2 Robot Car showing LiDAR sensor
Side view of the ROSMaster R2 Robot Car showing LiDAR sensor
5.1 How is AI Integrating with ROS for Autonomous Driving?
AI is playing an increasingly significant role in enhancing autonomous driving capabilities within the ROS framework.
- Perception: AI algorithms are used to process sensor data and extract meaningful information about the environment, such as identifying objects, detecting lane markings, and recognizing traffic signs.
- Decision-Making: AI is used to make decisions about how the car should behave, such as choosing a path, changing lanes, and avoiding obstacles.
- Control: AI algorithms can be used to control the car’s steering, throttle, and brakes, enabling smooth and efficient driving.
- End-to-End Learning: Some researchers are exploring end-to-end learning approaches, where AI algorithms learn to map sensor data directly to control commands, without the need for explicit perception, planning, and control modules.
- Reinforcement Learning: Reinforcement learning is used to train AI algorithms to drive in complex environments, by rewarding the car for desirable behaviors and penalizing it for undesirable ones.
- Data-Driven Approaches: AI algorithms rely on large amounts of data to learn and improve their performance, so data collection and management are crucial for AI-powered autonomous driving.
5.2 What is the Future of ROS in the Automotive Industry?
The future of ROS in the automotive industry is bright, with ROS poised to play an increasingly important role in the development of advanced automotive technologies.
- Widespread Adoption: ROS is expected to be widely adopted by automotive manufacturers and suppliers, as they seek to develop and deploy autonomous driving systems, ADAS, and other advanced technologies.
- Standardization: ROS may become a standardized platform for automotive software development, enabling interoperability and reducing development costs.
- Open-Source Collaboration: ROS is expected to foster open-source collaboration in the automotive industry, allowing companies to share knowledge and resources.
- New Business Models: ROS may enable new business models, such as software-as-a-service (SaaS) for automotive applications.
- Innovation: ROS is expected to drive innovation in the automotive industry, by providing a platform for researchers and developers to experiment with new ideas and technologies.
- Talent Development: ROS is expected to play a key role in talent development, by providing a framework for training the next generation of automotive engineers and technicians.
6. Step-by-Step Guide: Setting Up a Basic ROS Ackermann Car
Setting up a basic ROS Ackermann car involves several steps, from hardware selection to software configuration. This guide provides a high-level overview of the process.
- Hardware Selection: Choose the appropriate hardware components, including a microcontroller, sensors, actuators, and a power supply.
- ROS Installation: Install ROS on your computer and configure the ROS environment.
- Hardware Integration: Connect the hardware components to the microcontroller and configure the microcontroller to communicate with ROS.
- Sensor Drivers: Install and configure sensor drivers to provide ROS-compatible data streams from the sensors.
- Control Algorithms: Develop control algorithms to control the car’s steering and speed.
- Navigation Stack: Configure the ROS navigation stack to enable autonomous navigation.
- Testing and Tuning: Test the car in a simulated environment and tune the control algorithms and navigation parameters to achieve the desired performance.
- Real-World Deployment: Deploy the car in a real-world environment and continue to test and tune the system.
 ROSMaster R2 Robot Car with a remote control
ROSMaster R2 Robot Car with a remote control
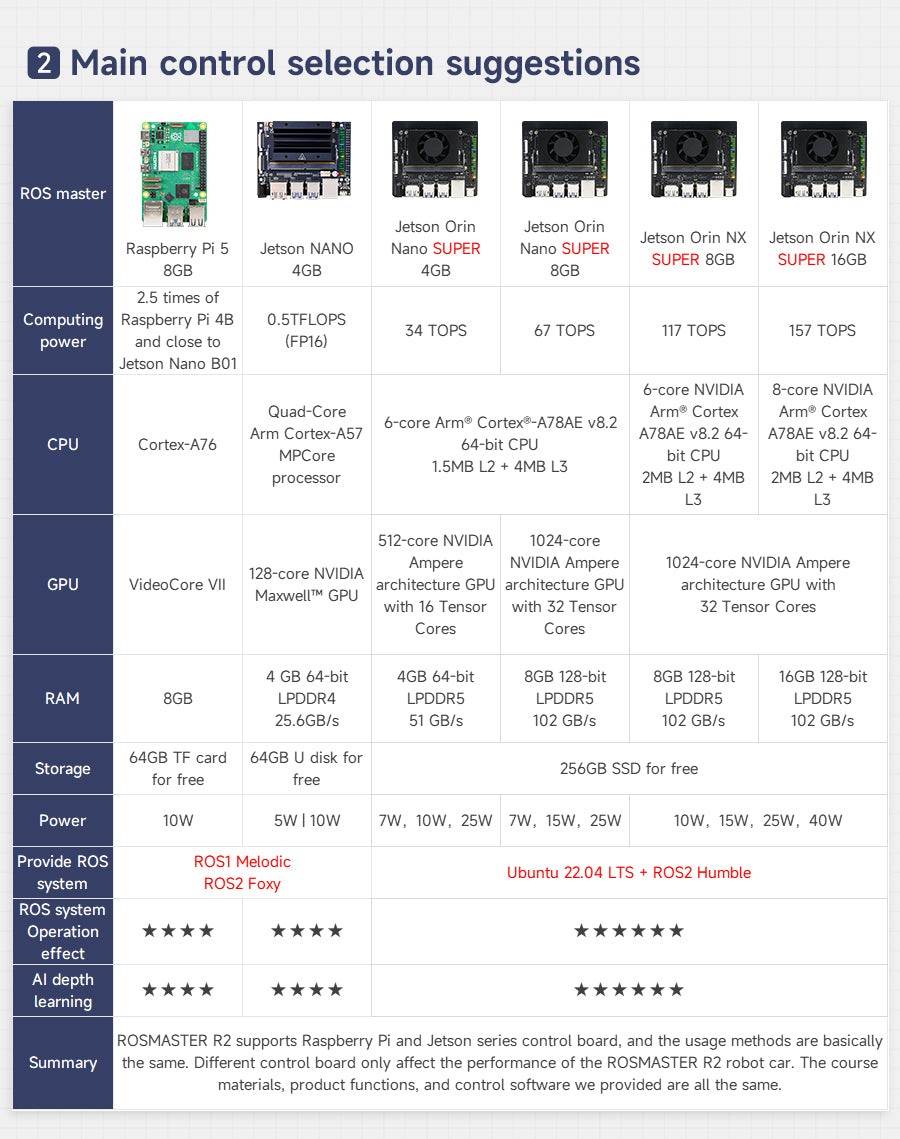
6.1 What are the Essential Hardware Components?
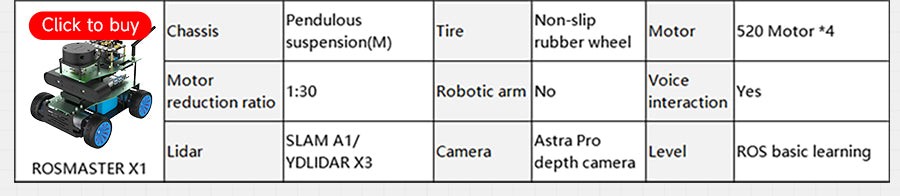
The essential hardware components for a ROS Ackermann car include:
| Component | Description |
|---|---|
| Microcontroller | Processes sensor data and controls actuators (e.g., Arduino, Raspberry Pi) |
| LiDAR | Provides 3D mapping and obstacle detection |
| Camera | Enables visual perception and object recognition |
| IMU | Measures acceleration and angular velocity |
| Encoders | Tracks wheel rotation for speed and distance data |
| Steering Motor | Controls the steering angle |
| Drive Motor | Propels the car forward and backward |
| Battery and Regulator | Provides power to all components |
6.2 How to Configure ROS for Ackermann Steering?
Configuring ROS for Ackermann steering involves setting up the appropriate ROS packages and parameters.
- Install ROS Packages: Install the necessary ROS packages, such as
ros_control,diff_drive_controller, andackermann_msgs. - Define Robot Model: Define the robot’s kinematic model in a URDF (Unified Robot Description Format) file, specifying the location and orientation of the wheels and steering joints.
- Configure Controllers: Configure the
diff_drive_controllerto control the car’s steering and speed, specifying the wheel radius, track width, and other parameters. - Create ROS Nodes: Create ROS nodes to read sensor data, process control commands, and publish the car’s state.
- Test and Tune: Test the system in a simulated environment and tune the controller parameters to achieve the desired performance.
7. Troubleshooting Common Issues with ROS Ackermann Cars
Working with ROS Ackermann cars can present various challenges. Here’s how to address some common issues.
- Sensor Noise: Filter sensor data to reduce noise and improve accuracy.
- Control Instability: Tune control parameters to achieve stable and responsive control.
- Navigation Errors: Calibrate sensors and tune navigation parameters to reduce localization and path planning errors.
- Communication Problems: Check network connections and ROS configurations to ensure reliable communication between nodes.
- Software Bugs: Debug ROS code to identify and fix software bugs.
- Hardware Failures: Inspect hardware components for damage or malfunction and replace as needed.
 Close up of electrical components and wiring on the ROSMaster R2 Robot Car
Close up of electrical components and wiring on the ROSMaster R2 Robot Car
7.1 How to Diagnose Sensor Problems?
Diagnosing sensor problems involves checking the sensor’s output, connections, and configuration.
- Check Sensor Output: Verify that the sensor is producing valid data by visualizing the sensor data in ROS.
- Inspect Connections: Ensure that the sensor is properly connected to the microcontroller and that all connections are secure.
- Verify Configuration: Check the sensor’s configuration parameters in ROS to ensure that they are correct.
- Calibrate Sensor: Calibrate the sensor to reduce systematic errors and improve accuracy.
- Replace Sensor: If the sensor is faulty, replace it with a new one.
7.2 What are Common Control Algorithm Issues and How to Fix Them?
Common control algorithm issues include instability, overshoot, and sluggishness. Here’s how to address them:
| Issue | Solution |
|---|---|
| Instability | Reduce the gain of the controller to improve stability. |
| Overshoot | Increase the damping of the controller to reduce overshoot. |
| Sluggishness | Increase the gain of the controller to improve responsiveness. |
| Steady-State Error | Add an integral term to the controller to eliminate steady-state error. |
| Oscillations | Adjust the derivative term of the controller to reduce oscillations. |
8. Case Studies: Successful Applications of ROS Ackermann Cars
Several successful case studies demonstrate the potential of ROS Ackermann cars in various applications.
- Autonomous Delivery: A company uses ROS Ackermann cars to deliver packages in urban areas, reducing delivery times and costs.
- Warehouse Automation: A warehouse deploys ROS Ackermann cars to automate inventory management and transportation, improving efficiency and reducing labor costs.
- Agricultural Monitoring: A farm uses ROS Ackermann cars to monitor crop health and detect pests, enabling precision agriculture and reducing pesticide use.
- Remote Inspection: A utility company uses ROS Ackermann cars to inspect power lines and pipelines, reducing the risk to human workers and improving safety.
 Components of the ROSMaster R2 Robot Car laid out for assembly
Components of the ROSMaster R2 Robot Car laid out for assembly
8.1 How are ROS Cars Used in Autonomous Delivery Systems?
ROS cars play a critical role in autonomous delivery systems by providing a platform for developing and testing autonomous navigation and control algorithms.
- Navigation: ROS cars use sensors such as LiDAR and cameras to navigate urban environments, avoiding obstacles and following traffic rules.
- Path Planning: ROS cars use path planning algorithms to generate optimal routes for delivering packages, taking into account traffic conditions and delivery deadlines.
- Localization: ROS cars use localization algorithms to estimate their position and orientation in the environment, ensuring accurate navigation.
- Control: ROS cars use control algorithms to control their steering, throttle, and brakes, enabling smooth and efficient driving.
- Integration with Delivery Systems: ROS cars are integrated with delivery management systems, allowing them to receive delivery orders, track packages, and communicate with customers.
8.2 What are the Benefits of ROS in Warehouse Automation?
ROS offers numerous benefits for warehouse automation, including improved efficiency, reduced costs, and increased safety.
- Autonomous Navigation: ROS enables robots to navigate warehouses autonomously, avoiding obstacles and following predefined routes.
- Inventory Management: ROS robots can be used to automate inventory management, scanning barcodes and tracking inventory levels.
- Transportation: ROS robots can be used to transport goods between different locations in the warehouse, reducing labor costs and improving efficiency.
- Integration with Warehouse Management Systems: ROS robots can be integrated with warehouse management systems, allowing them to receive orders, track inventory, and coordinate their activities.
- Safety: ROS robots can be equipped with safety sensors to prevent collisions and ensure the safety of human workers.
9. Ethical Considerations When Using ROS Software Ackermann Cars
As with any advanced technology, the use of ROS Software Ackermann Cars raises ethical considerations that must be addressed.
- Safety: Ensuring the safety of humans and property is paramount when deploying autonomous vehicles.
- Privacy: Protecting the privacy of individuals is crucial when collecting and using sensor data.
- Security: Securing ROS systems against cyberattacks is essential to prevent unauthorized access and control.
- Bias: Avoiding bias in AI algorithms is important to ensure fair and equitable outcomes.
- Transparency: Being transparent about the capabilities and limitations of ROS systems is crucial for building trust.
- Accountability: Establishing clear lines of accountability for the actions of autonomous vehicles is essential.
- Job Displacement: Addressing the potential for job displacement due to automation is important for mitigating social and economic impacts.
 ROSMaster R2 Robot Car driving on a floor mat
ROSMaster R2 Robot Car driving on a floor mat
9.1 How to Ensure Safety in Autonomous Vehicle Operation?
Ensuring safety in autonomous vehicle operation requires a multi-faceted approach.
- Redundant Systems: Implement redundant systems to provide backup in case of failures.
- Fail-Safe Mechanisms: Incorporate fail-safe mechanisms to bring the vehicle to a safe stop in case of emergencies.
- Rigorous Testing: Conduct rigorous testing in simulated and real-world environments to identify and mitigate potential hazards.
- Regular Maintenance: Perform regular maintenance to ensure that all systems are functioning properly.
- Human Oversight: Provide human oversight to monitor the vehicle’s operation and intervene if necessary.
- Compliance with Regulations: Comply with all applicable safety regulations and standards.
9.2 What Privacy Measures Should be Implemented?
Implementing privacy measures is essential to protect the privacy of individuals when using ROS Software Ackermann Cars.
- Data Minimization: Collect only the data that is necessary for the intended purpose.
- Data Anonymization: Anonymize data to prevent the identification of individuals.
- Data Encryption: Encrypt data to protect it from unauthorized access.
- Data Retention Policies: Establish clear data retention policies to ensure that data is not stored for longer than necessary.
- Transparency: Be transparent about the types of data being collected and how it is being used.
- User Control: Provide users with control over their data, allowing them to access, correct, and delete their data.
10. Frequently Asked Questions (FAQ) about ROS Software Ackermann Cars
Here are some frequently asked questions about ROS Software Ackermann Cars:
- What is ROS? ROS is a flexible framework for writing robot software.
- What is Ackermann steering? Ackermann steering is a steering geometry that ensures that all wheels turn on the correct axis, preventing tire slippage.
- What are the key components of a ROS Ackermann car? The key components include a microcontroller, sensors, actuators, and a ROS software stack.
- What are the advantages of using ROS with Ackermann steering? Advantages include modularity, community support, reusability, and standardization.
- What are the common applications of ROS Ackermann cars? Common applications include autonomous vehicles, robotics research, and education.
- What skills are needed to work with ROS Ackermann cars? Skills include programming, ROS knowledge, robotics fundamentals, and sensor technology.
- How can technicians benefit from ROS training? Technicians can enhance their diagnostic skills, work with advanced technologies, and improve their problem-solving skills.
- What are the latest trends in ROS and Ackermann car technology? Latest trends include ROS 2, AI-powered navigation, and cloud robotics.
- What are the ethical considerations when using ROS Software Ackermann Cars? Ethical considerations include safety, privacy, and security.
- How can CAR-REMOTE-REPAIR.EDU.VN help you master ROS Software Ackermann Car technology? We offer specialized training courses, hands-on experience, and expert instructors.
 Angle view of the assembled ROSMaster R2 Robot Car
Angle view of the assembled ROSMaster R2 Robot Car
10.1 What are the Job Prospects for Technicians Skilled in ROS and Robotics?
The job prospects for technicians skilled in ROS and robotics are excellent, with demand expected to grow significantly in the coming years. According to the Bureau of Labor Statistics, employment of robotics technicians is projected to grow 4% from 2022 to 2032.
- High Demand: There is a high demand for technicians with ROS and robotics skills in various industries, including automotive, manufacturing, and logistics.
- Competitive Salaries: Technicians with ROS and robotics skills typically earn competitive salaries, reflecting the value of their expertise.
- Career Advancement Opportunities: There are numerous career advancement opportunities for technicians with ROS and robotics skills, such as moving into engineering or management roles.
- Emerging Technologies: The field of ROS and robotics is constantly evolving, providing technicians with opportunities to learn new skills and work with cutting-edge technologies.
- Global Opportunities: There are global opportunities for technicians with ROS and robotics skills, as companies around the world seek to automate their operations.
10.2 Where Can I Find More Information About CAR-REMOTE-REPAIR.EDU.VN’s Training Programs?
You can find more information about CAR-REMOTE-REPAIR.EDU.VN’s training programs on our website, CAR-REMOTE-REPAIR.EDU.VN.
- Course Catalog: Browse our course catalog to find detailed information about our ROS and automotive training programs.
- Program Overviews: Read program overviews to learn about the curriculum, objectives, and outcomes of our training programs.
- Faculty Profiles: Learn about our experienced instructors and their expertise in ROS and automotive engineering.
- Student Testimonials: Read student testimonials to hear about the experiences of our graduates and how our training programs have helped them advance their careers.
- Contact Us: Contact us to speak with a training advisor and get personalized guidance on choosing the right training program for your needs.
- Visit Our Facilities: Visit our state-of-the-art training facilities to see our hardware and software resources and meet our instructors.
Ready to Master ROS Software Ackermann Car Technology?
Don’t miss the opportunity to enhance your skills and career prospects. Visit CAR-REMOTE-REPAIR.EDU.VN today to explore our comprehensive training programs and remote support services. Address: 1700 W Irving Park Rd, Chicago, IL 60613, United States. Whatsapp: +1 (641) 206-8880. Let us help you become an expert in ROS Software Ackermann Car technology and remote automotive repair, focusing on ROS car control and robotics operating system car solutions.