Arduino Obstacle Avoiding Car Software empowers robots to navigate autonomously. At CAR-REMOTE-REPAIR.EDU.VN, we specialize in equipping technicians with the expertise to master these advanced systems. This article explores the intricacies of obstacle avoidance using Arduino, offering insights valuable for technicians aiming to enhance their skills and garage owners focused on innovation. You’ll discover practical applications and benefits, plus related concepts like ultrasonic sensors, servo motors, and autonomous navigation.
Contents
- 1. What Is Arduino Obstacle Avoiding Car Software?
- 1.1 What Are the Key Components of the Software?
- 1.2 How Does the Algorithm Work?
- 1.3 Why is Arduino Popular for this Application?
- 2. What Hardware is Needed for an Arduino Obstacle Avoiding Car?
- 2.1 What Are the Best Arduino Boards for this Project?
- 2.2 How Do Ultrasonic Sensors Work?
- 2.3 What is the Role of Motor Drivers?
- 3. How Do You Program an Arduino for Obstacle Avoidance?
- 3.1 What Libraries Are Commonly Used?
- 3.2 Can You Provide a Basic Code Example?
- 3.3 How Do You Calibrate the Sensors?
- 4. What Are Advanced Techniques for Obstacle Avoidance?
- 4.1 How Can Sensor Fusion Improve Performance?
- 4.2 What is Simultaneous Localization and Mapping (SLAM)?
- 4.3 How Can Machine Learning be Applied?
- 5. What Are Common Challenges and Solutions?
- 5.1 How to Deal with Sensor Inaccuracies?
- 5.2 What Are Common Motor Control Problems?
- 5.3 How to Improve Algorithmic Efficiency?
- 6. How Can CAR-REMOTE-REPAIR.EDU.VN Help You?
- 6.1 What Training Programs Do You Offer?
- 6.2 How Can Remote Diagnostic Systems Improve Your Garage?
- 6.3 What Support Do You Provide?
- 7. How Does Arduino Integrate with Automotive Systems?
- 7.1 What are Arduino-Based Diagnostic Tools?
- 7.2 Can Arduino Enhance Vehicle Performance?
- 7.3 How Does Arduino Aid in Custom Vehicle Modifications?
- 8. What Future Trends Can We Expect?
- 8.1 How Will Arduino Impact Electric Vehicles (EVs)?
- 8.2 What Role Will Arduino Play in Autonomous Driving?
- 8.3 How Will Diagnostics Evolve with Arduino?
- 9. What are the Benefits of Learning Arduino for Automotive Repair?
- 9.1 How Does it Improve Diagnostic Skills?
- 9.2 What Customization Opportunities Does it Offer?
- 9.3 What Career Paths Open Up?
- 10. Where Can You Learn More About Arduino and Automotive Repair?
- 10.1 What are the Best Online Courses?
- 10.2 Where Can You Find Hands-On Workshops?
- 10.3 Which Online Communities Are Most Helpful?
- FAQ: Arduino Obstacle Avoiding Car Software
1. What Is Arduino Obstacle Avoiding Car Software?
Arduino obstacle avoiding car software is a program designed to enable a robot car to navigate its environment without colliding with obstacles. This software integrates sensor data to make real-time decisions, enabling the car to change its course when an obstacle is detected. This system embodies autonomous navigation principles, making it invaluable for many applications.
- The system typically involves ultrasonic sensors that measure distances.
- The Arduino microcontroller processes this data and controls the car’s motors.
- Algorithms dictate decision-making, allowing the car to navigate around obstacles effectively.
1.1 What Are the Key Components of the Software?
The key components of Arduino obstacle avoiding car software include the sensor interface, the decision-making algorithm, and the motor control module. These components work together to enable the car to perceive, process, and react to its environment.
| Component | Description |
|---|---|
| Sensor Interface | Manages data input from sensors like ultrasonic sensors, converting analog signals into digital data that the Arduino can process. |
| Decision Algorithm | Processes sensor data to determine the presence of obstacles and calculates the necessary adjustments to the car’s trajectory. Common algorithms include reactive, deliberative, and hybrid approaches. |
| Motor Control Module | Translates the decisions made by the algorithm into commands for the motors, controlling the car’s speed and direction to avoid obstacles and navigate the environment effectively. This module often uses PWM (Pulse Width Modulation) to control motor speed precisely. |
1.2 How Does the Algorithm Work?
The obstacle avoidance algorithm functions by continuously scanning for obstacles, assessing their distance, and determining the optimal path to avoid them. It uses sensor data to create a simple map of its surroundings and makes decisions based on predefined rules and conditions.
- Scanning: The robot uses sensors to scan its surroundings, typically in a 180-degree arc in front of it.
- Distance Measurement: The algorithm calculates the distance to potential obstacles.
- Decision Making: Based on the distances measured, the algorithm decides whether to turn left, turn right, or proceed straight.
1.3 Why is Arduino Popular for this Application?
Arduino is popular for obstacle avoidance car projects because it’s easy to use, well-documented, and supported by a large community. Its simplicity allows beginners to quickly grasp the basics of robotics and programming, making it an ideal platform for educational and hobbyist projects.
- Simplicity: The Arduino IDE simplifies code development and uploading.
- Extensive Libraries: Many libraries support various sensors and motors.
- Community Support: A large community provides sample code, tutorials, and troubleshooting assistance.
2. What Hardware is Needed for an Arduino Obstacle Avoiding Car?
To build an Arduino obstacle avoiding car, you need several key hardware components, including the Arduino board, ultrasonic sensors, motor drivers, and a chassis. Each component plays a crucial role in the functionality of the robot.
- Arduino Board: Acts as the “brain” of the robot, processing sensor data and controlling the motors.
- Ultrasonic Sensors: Detect obstacles by emitting sound waves and measuring the time it takes for the waves to return.
- Motor Drivers: Control the motors that drive the wheels, enabling the robot to move forward, backward, and turn.
- Chassis: Provides a physical structure for mounting all the components.
2.1 What Are the Best Arduino Boards for this Project?
The best Arduino boards for an obstacle avoiding car project are typically the Arduino Uno and the Arduino Nano due to their balance of processing power, size, and cost. The Arduino Mega is also a viable option for more complex projects requiring additional input/output pins.
| Arduino Board | Pros | Cons |
|---|---|---|
| Arduino Uno | Widely supported, easy to use, and has ample documentation and community resources. | Limited memory and processing power compared to other boards. |
| Arduino Nano | Compact size makes it ideal for small robots, while still offering comparable performance to the Uno. | Can be more challenging to work with due to its smaller pins and form factor. |
| Arduino Mega | Offers significantly more I/O pins and memory, suitable for complex projects with many sensors and motors. | Larger size and higher cost may be prohibitive for simple obstacle avoidance car projects. |
2.2 How Do Ultrasonic Sensors Work?
Ultrasonic sensors operate by emitting a short burst of high-frequency sound waves and then listening for the echo. The sensor calculates the distance to an object based on the time it takes for the echo to return. These sensors are crucial for detecting obstacles in the car’s path.
- Emission: The sensor sends out a burst of ultrasonic sound.
- Reception: The sensor listens for the echo of the sound wave.
- Calculation: The distance is calculated using the formula: Distance = (Speed of Sound * Time) / 2.
2.3 What is the Role of Motor Drivers?
Motor drivers act as intermediaries between the Arduino and the motors. They provide the necessary current and voltage to drive the motors, and they allow the Arduino to control the speed and direction of the motors using low-power signals.
- Current Amplification: Motor drivers boost the current from the Arduino to a level sufficient for the motors.
- Direction Control: They allow the Arduino to change the direction of the motor’s rotation.
- Speed Control: Motor drivers enable precise control over the motor’s speed, often using PWM.
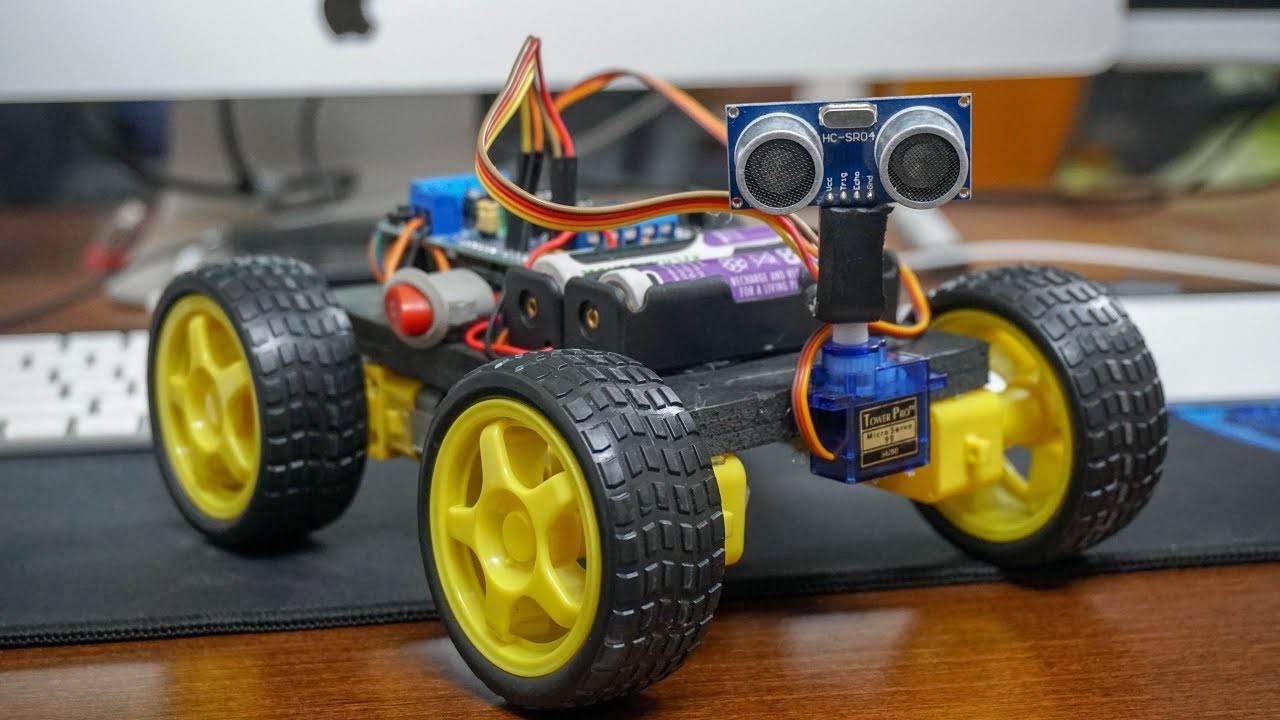 Arduino Obstacle Avoiding Car
Arduino Obstacle Avoiding Car
3. How Do You Program an Arduino for Obstacle Avoidance?
Programming an Arduino for obstacle avoidance involves writing code that reads sensor data, processes it to detect obstacles, and then controls the motors to navigate around those obstacles. This requires a combination of hardware interfacing and algorithmic logic.
- Sensor Reading: The code must first read data from the ultrasonic sensors.
- Data Processing: The code then processes the data to determine if an obstacle is present and how far away it is.
- Motor Control: Based on the processed data, the code controls the motors to move the car in a way that avoids the obstacle.
3.1 What Libraries Are Commonly Used?
Commonly used libraries for Arduino obstacle avoidance projects include the NewPing library for ultrasonic sensors and the AFMotor library for motor control. These libraries simplify the process of interfacing with the hardware and implementing control algorithms.
| Library | Purpose |
|---|---|
| NewPing | Simplifies the use of ultrasonic sensors by providing functions to send pings and measure the distance to objects. |
| AFMotor | Provides an easy way to control DC motors and stepper motors, allowing you to set the speed and direction of the motors. |
| Servo | Enables control of servo motors, which can be used to pan the ultrasonic sensor and scan a wider area. |
3.2 Can You Provide a Basic Code Example?
Here’s a basic code example that demonstrates how to read data from an ultrasonic sensor and control the motors to avoid obstacles:
#include <NewPing.h>
#include <AFMotor.h>
#define TRIG_PIN A0
#define ECHO_PIN A1
#define MAX_DISTANCE 200
NewPing sonar(TRIG_PIN, ECHO_PIN, MAX_DISTANCE);
AF_DCMotor motor1(1, MOTOR12_64KHZ);
AF_DCMotor motor2(2, MOTOR12_64KHZ);
AF_DCMotor motor3(3, MOTOR34_64KHZ);
AF_DCMotor motor4(4, MOTOR34_64KHZ);
void setup() {
motor1.setSpeed(150);
motor2.setSpeed(150);
motor3.setSpeed(150);
motor4.setSpeed(150);
}
void loop() {
int distance = sonar.ping_cm();
if (distance <= 30) {
moveStop();
delay(100);
moveBackward();
delay(500);
turnRight();
delay(500);
} else {
moveForward();
}
}
void moveStop() {
motor1.run(RELEASE);
motor2.run(RELEASE);
motor3.run(RELEASE);
motor4.run(RELEASE);
}
void moveForward() {
motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
}
void moveBackward() {
motor1.run(BACKWARD);
motor2.run(BACKWARD);
motor3.run(BACKWARD);
motor4.run(BACKWARD);
}
void turnRight() {
motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(BACKWARD);
motor4.run(BACKWARD);
}3.3 How Do You Calibrate the Sensors?
Calibrating ultrasonic sensors involves adjusting the code to account for variations in sensor performance and environmental conditions. This typically involves testing the sensor at known distances and adjusting the code to ensure accurate readings.
- Test at Known Distances: Place objects at known distances from the sensor and record the readings.
- Adjust Code: Modify the code to compensate for any discrepancies between the actual and measured distances.
- Account for Environmental Factors: Consider temperature and humidity, as these can affect the speed of sound and thus the sensor readings.
4. What Are Advanced Techniques for Obstacle Avoidance?
Advanced techniques for Arduino obstacle avoidance involve implementing more sophisticated algorithms and sensor fusion methods to improve the robot’s navigation capabilities. These techniques allow the robot to handle more complex environments and navigate more efficiently.
- Sensor Fusion: Combining data from multiple sensors to create a more accurate representation of the environment.
- Mapping: Building a map of the environment to plan optimal paths.
- Predictive Algorithms: Using predictive algorithms to anticipate the movement of obstacles.
4.1 How Can Sensor Fusion Improve Performance?
Sensor fusion improves performance by combining data from multiple sensors, such as ultrasonic sensors, infrared sensors, and cameras, to create a more accurate and reliable representation of the environment. This can help the robot to better detect and avoid obstacles, even in challenging conditions.
| Sensor Type | Benefits | Limitations |
|---|---|---|
| Ultrasonic | Provides accurate distance measurements, relatively unaffected by lighting conditions. | Can be affected by the angle and surface of the object, may not detect transparent or very small objects. |
| Infrared (IR) | Simple and inexpensive, can detect obstacles at close range. | Performance can be affected by ambient light, less accurate than ultrasonic sensors. |
| Camera (Vision) | Provides rich visual data, allowing for object recognition and tracking. | Requires significant processing power, performance can be affected by lighting conditions, more complex to implement. |
4.2 What is Simultaneous Localization and Mapping (SLAM)?
Simultaneous Localization and Mapping (SLAM) is an advanced technique that allows a robot to build a map of its environment while simultaneously determining its location within that map. This is particularly useful for autonomous navigation in unknown or dynamic environments.
- Mapping: The robot creates a map of its surroundings using sensor data.
- Localization: The robot determines its position within the map.
- Simultaneous Operation: Mapping and localization occur simultaneously, allowing the robot to navigate in real-time.
4.3 How Can Machine Learning be Applied?
Machine learning can be applied to Arduino obstacle avoidance to train the robot to recognize patterns and make more intelligent decisions about how to navigate its environment. This can improve the robot’s ability to handle complex and unpredictable situations.
- Pattern Recognition: Machine learning algorithms can be trained to recognize different types of obstacles.
- Decision Making: The robot can learn to make optimal decisions about how to avoid obstacles based on its past experiences.
- Adaptive Navigation: The robot can adapt its navigation strategy based on changes in its environment.
5. What Are Common Challenges and Solutions?
Building an Arduino obstacle avoiding car comes with several challenges, including sensor inaccuracies, motor control issues, and algorithmic complexities. Addressing these challenges requires careful planning, testing, and debugging.
- Sensor Inaccuracies: Variations in sensor performance can lead to inaccurate distance measurements.
- Motor Control Issues: Inconsistent motor speeds or response times can affect the robot’s ability to navigate accurately.
- Algorithmic Complexities: Designing an effective obstacle avoidance algorithm can be challenging, especially in complex environments.
5.1 How to Deal with Sensor Inaccuracies?
Dealing with sensor inaccuracies involves calibrating the sensors, using sensor fusion techniques, and implementing error correction algorithms. These methods can help to improve the accuracy and reliability of the robot’s sensor data.
- Calibration: Adjust the sensor readings to match known distances.
- Sensor Fusion: Combine data from multiple sensors to reduce the impact of individual sensor errors.
- Error Correction: Implement algorithms to filter out noise and correct for systematic errors.
5.2 What Are Common Motor Control Problems?
Common motor control problems include inconsistent motor speeds, jerky movements, and difficulty maintaining a straight course. These problems can be caused by variations in motor performance, friction in the drivetrain, or imbalances in the robot’s weight distribution.
| Problem | Cause | Solution |
|---|---|---|
| Inconsistent Speeds | Variations in motor performance, voltage fluctuations, or differences in friction. | Use motor encoders for feedback control, ensure a stable power supply, and lubricate moving parts. |
| Jerky Movements | Inadequate motor control resolution, abrupt changes in speed or direction. | Implement smoother acceleration and deceleration curves, increase the PWM frequency, and use higher-resolution motor drivers. |
| Difficulty Maintaining | Imbalances in weight distribution, uneven tire wear, or misaligned wheels. | Balance the robot’s weight, ensure even tire wear, and align the wheels properly. |
5.3 How to Improve Algorithmic Efficiency?
Improving algorithmic efficiency involves optimizing the code to reduce processing time and memory usage. This can be achieved through techniques such as simplifying the algorithm, using lookup tables, and optimizing data structures.
- Simplify Algorithm: Reduce the complexity of the algorithm by removing unnecessary calculations and logic.
- Use Lookup Tables: Pre-calculate and store frequently used values in lookup tables to avoid redundant calculations.
- Optimize Data Structures: Use efficient data structures to minimize memory usage and improve data access times.
6. How Can CAR-REMOTE-REPAIR.EDU.VN Help You?
At CAR-REMOTE-REPAIR.EDU.VN, we offer specialized training and resources to help automotive technicians and garage owners master the intricacies of Arduino-based robotics and remote diagnostic systems. Our comprehensive programs are designed to equip you with the skills needed to stay ahead in the rapidly evolving automotive industry. We are located at 1700 W Irving Park Rd, Chicago, IL 60613, United States, and can be reached via Whatsapp at +1 (641) 206-8880.
- Specialized Training: Enhance your skills with our in-depth courses on Arduino programming and robotics.
- Expert Resources: Access our extensive library of guides, tutorials, and code examples.
- Remote Diagnostic Systems: Learn how to implement and utilize remote diagnostic tools to improve your service offerings.
6.1 What Training Programs Do You Offer?
We offer a range of training programs tailored to different skill levels and interests. Our programs cover topics such as basic Arduino programming, sensor integration, motor control, and advanced robotics concepts.
| Program Name | Description | Target Audience |
|---|---|---|
| Arduino Basics for Robotics | A foundational course covering the basics of Arduino programming, electronics, and robotics. Participants will learn how to set up an Arduino development environment, write code to control motors and sensors, and build simple robotic projects. | Beginners with little to no experience in Arduino or robotics. |
| Advanced Sensor Integration | This program focuses on integrating various types of sensors, such as ultrasonic, infrared, and camera sensors, into Arduino-based systems. Participants will learn how to calibrate sensors, fuse data from multiple sensors, and use sensor data to make intelligent decisions about robot behavior. | Technicians and hobbyists with some experience in Arduino who want to improve their ability to use sensors in their projects. |
| Motor Control Techniques | This course covers advanced motor control techniques, such as PID control, PWM modulation, and motor feedback systems. Participants will learn how to precisely control the speed and position of motors, and how to design systems that can maintain a desired course or trajectory. | Engineers and technicians who need to develop high-performance motor control systems for robotics or automation applications. |
6.2 How Can Remote Diagnostic Systems Improve Your Garage?
Implementing remote diagnostic systems can significantly improve the efficiency and profitability of your garage by allowing you to diagnose and troubleshoot vehicles remotely. This can reduce downtime, improve customer satisfaction, and expand your service offerings.
- Reduced Downtime: Diagnose problems quickly and efficiently, minimizing vehicle downtime.
- Improved Customer Satisfaction: Provide faster and more convenient service to your customers.
- Expanded Service Offerings: Offer remote diagnostic services to customers who are unable to bring their vehicles to your garage.
6.3 What Support Do You Provide?
We provide comprehensive support to our students and customers, including access to our online forum, personalized coaching, and technical assistance. Our goal is to ensure that you have the resources and support you need to succeed in your Arduino and robotics projects.
- Online Forum: Connect with other students and experts in our online forum.
- Personalized Coaching: Receive one-on-one coaching from our experienced instructors.
- Technical Assistance: Get help with technical issues and troubleshooting from our support team.
7. How Does Arduino Integrate with Automotive Systems?
Arduino’s integration with automotive systems is revolutionizing diagnostics and customization, enhancing vehicle performance and functionality. By bridging the gap between open-source technology and automotive engineering, Arduino offers innovative solutions for both professionals and enthusiasts.
- Customizable Interfaces: Create bespoke dashboards and control panels.
- Data Logging: Track vehicle performance metrics in real-time.
- Diagnostic Tools: Develop custom diagnostic devices for detailed analysis.
7.1 What are Arduino-Based Diagnostic Tools?
Arduino-based diagnostic tools provide a cost-effective and customizable solution for automotive diagnostics. These tools can read and interpret data from the vehicle’s onboard diagnostic system (OBD-II), offering detailed insights into engine performance, sensor readings, and potential issues.
| Feature | Description | Benefits |
|---|---|---|
| OBD-II Interface | Reads and interprets data from the vehicle’s OBD-II port, providing access to a wide range of diagnostic information. | Enables detailed monitoring of engine performance and identification of potential issues. |
| Custom Dashboards | Allows users to create custom dashboards that display real-time data, such as engine temperature, speed, and fuel consumption. | Provides a user-friendly interface for monitoring vehicle performance and identifying anomalies. |
| Data Logging | Records diagnostic data over time, allowing for detailed analysis of vehicle performance and identification of intermittent issues. | Facilitates proactive maintenance and helps identify underlying problems that may not be immediately apparent. |
7.2 Can Arduino Enhance Vehicle Performance?
Yes, Arduino can enhance vehicle performance through custom modifications and control systems. For example, it can be used to optimize engine parameters, control auxiliary devices, and implement advanced features like traction control and launch control.
- Engine Parameter Optimization: Fine-tune engine parameters such as fuel injection and ignition timing.
- Auxiliary Device Control: Control and monitor devices such as cooling fans and turbochargers.
- Advanced Control Systems: Implement features like traction control and launch control for improved performance.
7.3 How Does Arduino Aid in Custom Vehicle Modifications?
Arduino simplifies custom vehicle modifications by providing a flexible and programmable platform for controlling various vehicle systems. This allows enthusiasts and professionals to create unique and personalized vehicles with enhanced functionality.
- Programmable Control: Customize vehicle systems using Arduino’s flexible programming environment.
- Sensor Integration: Integrate additional sensors to monitor and control vehicle parameters.
- Custom Interfaces: Create custom dashboards and control panels for personalized vehicle control.
8. What Future Trends Can We Expect?
The future of Arduino in automotive technology looks promising, with trends pointing towards increased integration with electric vehicles (EVs), enhanced autonomous driving capabilities, and the development of more sophisticated diagnostic tools.
- EV Integration: Using Arduino to monitor and control EV systems.
- Autonomous Driving: Enhancing autonomous driving capabilities through sensor fusion and machine learning.
- Advanced Diagnostics: Developing more sophisticated diagnostic tools for complex vehicle systems.
8.1 How Will Arduino Impact Electric Vehicles (EVs)?
Arduino is poised to play a significant role in the development and maintenance of electric vehicles (EVs). It can be used to monitor battery performance, control charging systems, and manage energy consumption, helping to improve the efficiency and reliability of EVs.
| Application | Description | Benefits |
|---|---|---|
| Battery Monitoring | Uses sensors to monitor the voltage, current, and temperature of the battery pack, providing real-time data on battery health and performance. | Enables early detection of potential issues, preventing battery damage and ensuring optimal performance. |
| Charging Control | Controls the charging process, optimizing charging speed and preventing overcharging. | Extends battery life and improves charging efficiency. |
| Energy Management | Manages energy consumption by optimizing the use of various vehicle systems, such as the HVAC and lighting systems. | Maximizes driving range and improves overall energy efficiency. |
8.2 What Role Will Arduino Play in Autonomous Driving?
Arduino can contribute to autonomous driving by providing a platform for sensor fusion, data processing, and control system development. While it may not be suitable for high-level autonomous driving tasks, it can be used for prototyping and testing various autonomous driving components.
- Sensor Fusion: Combining data from multiple sensors to improve perception accuracy.
- Data Processing: Processing sensor data to identify obstacles and plan paths.
- Control System Development: Developing and testing control algorithms for autonomous vehicle systems.
8.3 How Will Diagnostics Evolve with Arduino?
Diagnostics are set to evolve significantly with Arduino, leading to more precise, versatile, and user-friendly solutions. The flexibility and customizability of Arduino allow for creating diagnostic tools that can address specific needs and challenges in vehicle maintenance.
| Aspect | Description | Benefits |
|---|---|---|
| Predictive Maint. | Utilizes machine learning algorithms to analyze vehicle data and predict potential maintenance needs. | Allows for proactive maintenance, reducing the risk of unexpected breakdowns and extending vehicle lifespan. |
| Remote Diagnostics | Enables remote diagnosis of vehicle issues, reducing the need for on-site inspections and improving service efficiency. | Provides faster and more convenient service, especially for customers who are unable to bring their vehicles to the garage. |
| Custom Solutions | Allows for the creation of custom diagnostic tools tailored to specific vehicle models or maintenance needs. | Ensures that diagnostic tools are perfectly suited to the task at hand, improving accuracy and efficiency. |
9. What are the Benefits of Learning Arduino for Automotive Repair?
Learning Arduino for automotive repair provides numerous benefits, including enhanced diagnostic skills, the ability to customize vehicle systems, and increased career opportunities. As the automotive industry becomes increasingly reliant on technology, technicians with Arduino skills will be in high demand.
- Enhanced Diagnostic Skills: Develop the ability to diagnose and troubleshoot complex vehicle issues.
- Customization of Vehicle Systems: Gain the ability to customize and enhance vehicle systems.
- Increased Career Opportunities: Open doors to new and exciting career opportunities in the automotive industry.
9.1 How Does it Improve Diagnostic Skills?
Arduino enhances diagnostic skills by providing a platform for creating custom diagnostic tools and analyzing vehicle data. This allows technicians to gain a deeper understanding of vehicle systems and identify potential issues more effectively.
- Custom Tool Creation: Develop tools tailored to specific diagnostic needs.
- Data Analysis: Analyze vehicle data to identify patterns and anomalies.
- System Understanding: Gain a deeper understanding of vehicle systems and their interactions.
9.2 What Customization Opportunities Does it Offer?
Arduino offers extensive customization opportunities, allowing technicians to modify and enhance vehicle systems to meet specific needs and preferences. This can include creating custom dashboards, controlling auxiliary devices, and implementing advanced control systems.
- Custom Dashboards: Design dashboards that display real-time vehicle data.
- Auxiliary Device Control: Control devices such as lighting and cooling systems.
- Advanced Control Systems: Implement features like traction control and launch control.
9.3 What Career Paths Open Up?
Learning Arduino can open up a variety of career paths in the automotive industry, including roles in vehicle diagnostics, custom vehicle modifications, and automotive research and development. Technicians with Arduino skills are well-positioned to take on leadership roles and drive innovation in the industry.
| Career Path | Description | Responsibilities |
|---|---|---|
| Automotive Diagnostic Spec. | Specializes in diagnosing and troubleshooting complex vehicle issues using advanced diagnostic tools and techniques. | Performing vehicle diagnostics, analyzing vehicle data, creating custom diagnostic tools, and providing technical support to other technicians. |
| Custom Vehicle Modifier | Modifies and enhances vehicle systems to meet specific needs and preferences, using Arduino and other programmable platforms. | Designing and implementing custom vehicle modifications, integrating new technologies into vehicles, and creating custom interfaces and control systems. |
| Automotive R&D Technician | Works in research and development, developing new automotive technologies and improving existing systems. | Conducting research, designing and testing new technologies, and developing prototypes and proof-of-concept systems. |
10. Where Can You Learn More About Arduino and Automotive Repair?
To learn more about Arduino and automotive repair, consider exploring online courses, attending workshops, and joining online communities. These resources can provide you with the knowledge and skills you need to succeed in this exciting field. Remember, CAR-REMOTE-REPAIR.EDU.VN offers many courses, and we are located at 1700 W Irving Park Rd, Chicago, IL 60613, United States, and can be reached via Whatsapp at +1 (641) 206-8880.
- Online Courses: Take online courses to learn the basics of Arduino programming and automotive repair.
- Workshops: Attend hands-on workshops to gain practical experience.
- Online Communities: Join online communities to connect with other enthusiasts and experts.
10.1 What are the Best Online Courses?
The best online courses for learning Arduino and automotive repair include those offered by reputable institutions such as Coursera, Udemy, and edX. These courses cover a wide range of topics, from basic Arduino programming to advanced automotive diagnostics.
| Platform | Course Name | Description |
|---|---|---|
| Coursera | Introduction to Arduino Programming and Development | A comprehensive course covering the basics of Arduino programming, electronics, and hardware interfacing. |
| Udemy | Automotive Electrical Fundamentals | An in-depth course covering the fundamentals of automotive electrical systems, including wiring, circuits, and diagnostic techniques. |
| edX | Embedded Systems – Shape The World: Introduction to Microcontroller | An introductory course to embedded systems with a focus on microcontroller programming and applications. |
10.2 Where Can You Find Hands-On Workshops?
Hands-on workshops can be found at local community colleges, vocational schools, and maker spaces. These workshops provide you with the opportunity to work with Arduino and automotive equipment under the guidance of experienced instructors.
- Community Colleges: Offer workshops on Arduino programming and automotive repair.
- Vocational Schools: Provide hands-on training in automotive diagnostics and repair.
- Maker Spaces: Offer access to tools and equipment for building and experimenting with Arduino projects.
10.3 Which Online Communities Are Most Helpful?
Helpful online communities for learning about Arduino and automotive repair include the Arduino Forum, the Electronics Stack Exchange, and various automotive enthusiast forums. These communities provide a platform for asking questions, sharing knowledge, and connecting with other enthusiasts and experts.
| Community | Description | Benefits |
|---|---|---|
| Arduino Forum | A forum dedicated to Arduino programming and projects. | Provides a platform for asking questions, sharing code, and getting help with Arduino projects. |
| Electronics Stack Exch. | A question-and-answer site for electronics enthusiasts and professionals. | Offers a wealth of information on electronics and hardware-related topics. |
| Auto Enthusiast Forums | Online forums dedicated to automotive enthusiasts, such as the Garage Journal and the Mustang Forums. | Provide a platform for discussing automotive topics, sharing knowledge, and connecting with other enthusiasts. |
Ready to take your automotive repair skills to the next level? Visit CAR-REMOTE-REPAIR.EDU.VN today to explore our training programs and discover how we can help you master Arduino and remote diagnostic systems. Contact us at 1700 W Irving Park Rd, Chicago, IL 60613, United States, or via Whatsapp at +1 (641) 206-8880.
FAQ: Arduino Obstacle Avoiding Car Software
- Q1: What is the primary function of Arduino obstacle avoiding car software?
- The primary function is to enable a robot car to autonomously navigate its environment by detecting and avoiding obstacles.
- Q2: What are the essential hardware components needed for an Arduino obstacle avoiding car?
- Essential components include an Arduino board, ultrasonic sensors, motor drivers, and a chassis.
- Q3: Which Arduino boards are best suited for obstacle avoidance projects?
- The Arduino Uno and Arduino Nano are typically favored for their balance of processing power, size, and ease of use.
- Q4: How do ultrasonic sensors work in obstacle avoidance systems?
- Ultrasonic sensors emit sound waves and measure the time it takes for the echo to return, calculating the distance to objects.
- Q5: What role do motor drivers play in an Arduino obstacle avoiding car?
- Motor drivers provide the necessary current and voltage to drive the motors, allowing the Arduino to control their speed and direction.
- Q6: Can you provide a simple code example for obstacle avoidance?
- Yes, the article includes a basic code example demonstrating how to read data from an ultrasonic sensor and control motors to avoid obstacles.
- Q7: How can sensor fusion improve the performance of obstacle avoidance systems?
- Sensor fusion combines data from multiple sensors to create a more accurate and reliable representation of the environment.
- Q8: What is Simultaneous Localization and Mapping (SLAM) and how is it used?
- SLAM is an advanced technique that allows a robot to build a map of its environment while simultaneously determining its location within that map.
- Q9: How can machine learning be applied to Arduino obstacle avoidance?
- Machine learning can train the robot to recognize patterns and make more intelligent decisions about navigating its environment.
- Q10: What are some common challenges in building an Arduino obstacle avoiding car?
- Common challenges include sensor inaccuracies, motor control issues, and algorithmic complexities.