Self driving cars rely heavily on sophisticated software control algorithms to navigate and operate safely; CAR-REMOTE-REPAIR.EDU.VN offers the expertise and training needed to master these technologies. These algorithms are the brains behind autonomous driving, interpreting sensor data, making real-time decisions, and controlling the vehicle’s movements, so dive in to learn more about vehicle repair! Enhance your skillset and stay ahead of the curve with insights into vehicle repair, automotive software, and remote diagnostic tools.
Contents
- 1. What Role Do Software Control Algorithms Play in Self-Driving Cars?
- 1.1 Perception
- 1.2 Planning
- 1.3 Control
- 2. How Do Perception Algorithms in Self-Driving Cars Work?
- 2.1 Object Detection and Classification
- 2.2 Scene Understanding
- 2.3 Challenges in Perception
- 2.4 Sanity Conditions
- 3. How Do Planning Algorithms Work in Self-Driving Cars?
- 3.1 Route Planning
- 3.2 Behavioral Planning
- 3.3 Motion Planning
- 3.4 Challenges in Planning
- 4. How Do Control Algorithms Work in Self-Driving Cars?
- 4.1 Steering Control
- 4.2 Speed Control
- 4.3 Braking Control
- 4.4 Challenges in Control
- 5. How Can Mathematical Logic Improve Self-Driving Car Safety?
- 5.1 Timed Quality Temporal Logic (TQTL)
- 5.2 Formal Verification
- 5.3 Challenges in Using Mathematical Logic
- 6. What Are the Testing Methods for Self-Driving Car Software?
- 6.1 Simulation Testing
- 6.2 Field Testing
- 6.3 Regression Testing
- 6.4 Challenges in Testing
- 7. What Are the Ethical Considerations of Software Control Algorithms?
- 7.1 Safety
- 7.2 Algorithmic Bias
- 7.3 Privacy
- 7.4 Accountability
- 7.5 Challenges in Ethical Considerations
- 8. How Do Over-the-Air (OTA) Updates Affect Software in Self-Driving Cars?
- 8.1 Benefits of OTA Updates
- 8.2 Security Considerations
- 8.3 Challenges in OTA Updates
- 9. What Training is Available for Automotive Technicians on Self-Driving Car Software?
- 9.1 Comprehensive Curriculum
- 9.2 Hands-On Training
- 9.3 Expert Instructors
- 9.4 Certification Programs
- 10. What are the Future Trends in Software Control Algorithms for Self-Driving Cars?
- 10.1 Artificial Intelligence (AI)
- 10.2 Edge Computing
- 10.3 Cybersecurity
- 10.4 Collaboration
- 10.5 Challenges in Future Trends
- FAQ: Software Control Algorithms in Self-Driving Cars
- 1. What are software control algorithms in self-driving cars?
- 2. How do perception algorithms work in self-driving cars?
- 3. What is the role of planning algorithms in self-driving cars?
- 4. How do control algorithms execute planned maneuvers in self-driving cars?
- 5. How does mathematical logic improve self-driving car safety?
- 6. What are the key testing methods for self-driving car software?
- 7. What ethical considerations are important in developing software control algorithms for self-driving cars?
- 8. How do Over-the-Air (OTA) updates affect software in self-driving cars?
- 9. What training is available for automotive technicians on self-driving car software?
- 10. What are the future trends in software control algorithms for self-driving cars?
1. What Role Do Software Control Algorithms Play in Self-Driving Cars?
Software control algorithms are the core of autonomous vehicles, as they make decisions based on sensor input. These algorithms process data from various sensors, including cameras, radar, lidar, and GPS, to perceive the environment, plan routes, and control vehicle functions.
1.1 Perception
Perception algorithms interpret sensor data to create a detailed understanding of the vehicle’s surroundings. According to research from the Massachusetts Institute of Technology (MIT), Department of Mechanical Engineering, in July 2025, advanced perception systems provide accurate and reliable environmental awareness. This involves:
- Object Detection: Identifying and classifying objects such as pedestrians, vehicles, traffic signs, and obstacles.
- Scene Understanding: Building a comprehensive model of the environment, including lane markings, road boundaries, and traffic flow.
- Sensor Fusion: Combining data from multiple sensors to improve accuracy and robustness, ensuring that the system can handle sensor limitations or failures.
1.2 Planning
Planning algorithms use the perceived environment to determine the optimal path and driving maneuvers. This includes:
- Route Planning: Calculating the most efficient route to the destination while considering traffic conditions, road closures, and other factors.
- Behavioral Planning: Deciding on high-level actions such as lane changes, merging, and yielding to other vehicles.
- Motion Planning: Generating detailed trajectories that specify the vehicle’s speed, acceleration, and steering inputs to execute the planned maneuvers safely and smoothly.
1.3 Control
Control algorithms execute the planned maneuvers by sending commands to the vehicle’s actuators, such as the steering wheel, throttle, and brakes. These algorithms ensure precise and stable vehicle control, even in challenging conditions:
- Steering Control: Maintaining the vehicle’s position within the lane and executing lane changes and turns.
- Speed Control: Regulating the vehicle’s speed to match traffic flow and maintain a safe following distance.
- Braking Control: Applying the brakes to slow down or stop the vehicle, either in response to traffic conditions or to avoid collisions.
2. How Do Perception Algorithms in Self-Driving Cars Work?
Perception algorithms are crucial for autonomous vehicles to “see” and understand their environment. These algorithms use data from sensors like cameras, lidar, and radar to detect and classify objects, interpret scenes, and build a comprehensive model of the surroundings.
2.1 Object Detection and Classification
Object detection and classification are fundamental tasks of perception algorithms. These processes involve identifying and categorizing objects such as pedestrians, vehicles, traffic signs, and obstacles. Key techniques include:
- Convolutional Neural Networks (CNNs): CNNs are widely used for image recognition tasks. They learn to extract relevant features from images and classify objects based on these features.
- Deep Learning Models: Advanced deep learning models, such as YOLO (You Only Look Once) and SSD (Single Shot MultiBox Detector), can detect multiple objects in a single pass, making them suitable for real-time applications.
- Sensor Fusion: Combining data from multiple sensors, such as cameras and lidar, improves the accuracy and robustness of object detection. For example, lidar can provide precise distance measurements, while cameras can capture detailed visual information.
2.2 Scene Understanding
Scene understanding involves building a comprehensive model of the environment, including lane markings, road boundaries, and traffic flow. This is essential for autonomous vehicles to navigate safely and efficiently. Techniques include:
- Semantic Segmentation: Assigning a label to each pixel in an image, allowing the system to distinguish between different regions such as roads, sidewalks, and buildings.
- Lane Detection: Identifying lane markings and estimating the vehicle’s position relative to the lanes.
- 3D Reconstruction: Creating a 3D representation of the environment using data from lidar and cameras, enabling the system to understand the spatial relationships between objects.
2.3 Challenges in Perception
Despite significant advances, perception algorithms still face several challenges:
- Adverse Weather Conditions: Rain, snow, and fog can degrade sensor performance and reduce the accuracy of object detection.
- Occlusion: Objects can be partially or fully hidden by other objects, making them difficult to detect.
- Dynamic Environments: The environment is constantly changing, with moving vehicles, pedestrians, and other dynamic elements that the system must track in real-time.
CAR-REMOTE-REPAIR.EDU.VN provides specialized training to address these challenges, equipping technicians with the skills to diagnose and repair perception systems effectively.
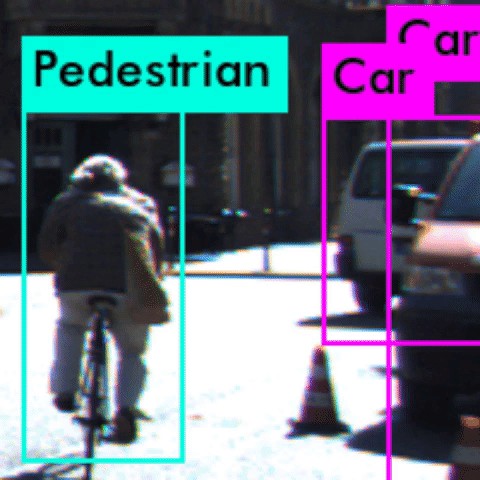 Perception algorithms misclassify the cyclist as a pedestrian with high confidence
Perception algorithms misclassify the cyclist as a pedestrian with high confidence
2.4 Sanity Conditions
One of the critical aspects of perception algorithms is ensuring they adhere to what researchers call “sanity conditions.” These are basic laws of physics and common-sense assumptions that humans implicitly use when perceiving the world. According to Jyo Deshmukh, a USC computer science professor, these conditions are essential for reliable performance.
- Persistence: Objects should not appear and disappear from one frame to the next without a valid reason.
- Consistency: The classification of objects should remain consistent over time, unless there is a clear change in the object’s appearance.
- Continuity: The position and velocity of objects should change smoothly over time, without sudden jumps or discontinuities.
Violations of these sanity conditions can indicate bugs or errors in the perception system. Methods like Timed Quality Temporal Logic are used to test and identify these violations, ensuring the algorithms are more robust and reliable.
3. How Do Planning Algorithms Work in Self-Driving Cars?
Planning algorithms are essential for autonomous vehicles to navigate safely and efficiently. These algorithms use the perceived environment to determine the optimal path and driving maneuvers, ensuring the vehicle can reach its destination without incident.
3.1 Route Planning
Route planning involves calculating the most efficient path to the destination, considering factors such as traffic conditions, road closures, and other constraints. Key techniques include:
- A* Search Algorithm: A* is a widely used pathfinding algorithm that finds the lowest-cost path between two points. It uses a heuristic function to estimate the cost to the destination, allowing it to efficiently explore the search space.
- Dijkstra’s Algorithm: Dijkstra’s algorithm is another popular pathfinding algorithm that finds the shortest path from a starting node to all other nodes in a graph.
- Real-Time Traffic Data: Incorporating real-time traffic data from sources like Google Maps or Waze allows the planning algorithm to adapt to changing conditions and avoid congested areas.
3.2 Behavioral Planning
Behavioral planning involves deciding on high-level actions such as lane changes, merging, and yielding to other vehicles. This requires the system to understand the intentions of other road users and make decisions that are both safe and efficient. Techniques include:
- Finite State Machines (FSMs): FSMs are used to model the different driving states, such as following a lane, changing lanes, and approaching an intersection. The system transitions between these states based on the perceived environment and the vehicle’s goals.
- Decision Trees: Decision trees are used to make decisions based on a set of rules and conditions. For example, a decision tree might determine whether to change lanes based on the presence of other vehicles, the speed of traffic, and the distance to the destination.
- Reinforcement Learning: Reinforcement learning can be used to train the system to make optimal decisions in complex and dynamic environments. The system learns from its experiences and adjusts its behavior to maximize a reward signal, such as reaching the destination quickly and safely.
3.3 Motion Planning
Motion planning involves generating detailed trajectories that specify the vehicle’s speed, acceleration, and steering inputs to execute the planned maneuvers safely and smoothly. Key techniques include:
- Polynomial Trajectory Planning: Generating smooth trajectories using polynomial functions, ensuring that the vehicle’s motion is comfortable and predictable.
- Model Predictive Control (MPC): MPC is an advanced control technique that predicts the vehicle’s future behavior and optimizes the control inputs to achieve the desired trajectory while satisfying constraints such as speed limits and collision avoidance.
- Sampling-Based Planning: Generating trajectories by randomly sampling points in the state space and connecting them with smooth curves. This approach is particularly useful in complex environments with many obstacles.
3.4 Challenges in Planning
Planning algorithms face several challenges in ensuring safe and efficient navigation:
- Uncertainty: The perceived environment is often uncertain due to sensor noise and limitations. The planning algorithm must be robust to this uncertainty and make decisions that are safe even in the presence of incomplete or inaccurate information.
- Complexity: The environment is highly complex, with many interacting agents and unpredictable events. The planning algorithm must be able to reason about the behavior of other road users and plan accordingly.
- Real-Time Performance: The planning algorithm must operate in real-time, generating trajectories quickly enough to respond to changing conditions.
CAR-REMOTE-REPAIR.EDU.VN offers advanced training to address these planning challenges, providing technicians with the expertise to troubleshoot and optimize autonomous vehicle planning systems.
4. How Do Control Algorithms Work in Self-Driving Cars?
Control algorithms are essential for executing planned maneuvers by sending commands to the vehicle’s actuators. These algorithms ensure precise and stable vehicle control, even in challenging conditions.
4.1 Steering Control
Steering control involves maintaining the vehicle’s position within the lane and executing lane changes and turns. Key techniques include:
- PID Control: PID (Proportional-Integral-Derivative) control is a widely used control technique that adjusts the steering angle based on the error between the desired and actual position.
- Model Predictive Control (MPC): MPC can be used to predict the vehicle’s future behavior and optimize the steering inputs to follow the desired trajectory while satisfying constraints such as lane boundaries and vehicle dynamics.
- Lane Keeping Assist Systems (LKAS): LKAS uses camera data to detect lane markings and automatically adjust the steering to keep the vehicle centered in the lane.
4.2 Speed Control
Speed control involves regulating the vehicle’s speed to match traffic flow and maintain a safe following distance. Techniques include:
- PID Control: PID control can be used to adjust the throttle and brakes based on the error between the desired and actual speed.
- Adaptive Cruise Control (ACC): ACC uses radar or lidar to measure the distance to the vehicle ahead and automatically adjust the speed to maintain a safe following distance.
- Traffic Sign Recognition: Recognizing speed limit signs and adjusting the vehicle’s speed accordingly.
4.3 Braking Control
Braking control involves applying the brakes to slow down or stop the vehicle, either in response to traffic conditions or to avoid collisions. Techniques include:
- Anti-lock Braking System (ABS): ABS prevents the wheels from locking up during braking, allowing the driver to maintain steering control.
- Electronic Stability Control (ESC): ESC detects when the vehicle is losing control and automatically applies the brakes to individual wheels to stabilize the vehicle.
- Emergency Braking Systems (EBS): EBS uses sensors to detect imminent collisions and automatically apply the brakes to reduce the severity of the impact.
4.4 Challenges in Control
Control algorithms face several challenges in ensuring safe and stable vehicle control:
- Vehicle Dynamics: The vehicle’s behavior is influenced by complex dynamics, such as tire slip, aerodynamic forces, and suspension characteristics. The control algorithm must account for these dynamics to achieve precise control.
- Uncertainty: The vehicle’s state and the environment are often uncertain due to sensor noise and limitations. The control algorithm must be robust to this uncertainty and maintain stability even in the presence of disturbances.
- Real-Time Performance: The control algorithm must operate in real-time, generating control commands quickly enough to respond to changing conditions.
CAR-REMOTE-REPAIR.EDU.VN offers specialized training to address these control challenges, equipping technicians with the skills to diagnose and repair autonomous vehicle control systems effectively.
5. How Can Mathematical Logic Improve Self-Driving Car Safety?
Mathematical logic can significantly improve the safety and reliability of self-driving cars by providing a formal framework for specifying and verifying the behavior of autonomous systems.
5.1 Timed Quality Temporal Logic (TQTL)
Timed Quality Temporal Logic (TQTL) is a mathematical logic developed by researchers at USC and Arizona State University to test and evaluate the performance of perception algorithms in self-driving cars. TQTL allows developers to specify “sanity conditions” or basic laws of physics that the perception system should satisfy.
- Specifying Sanity Conditions: TQTL can be used to specify conditions such as “an object should not disappear from one frame to the next” or “the classification of an object should remain consistent over time.”
- Detecting Violations: By monitoring the output of the perception system, TQTL can detect violations of these sanity conditions, indicating potential bugs or errors in the system.
- Improving Reliability: Identifying and fixing these violations can improve the reliability and robustness of the perception system, making it safer for deployment in autonomous vehicles.
5.2 Formal Verification
Formal verification is a technique that uses mathematical methods to prove that a system satisfies a given set of specifications. This can be used to verify the correctness of software control algorithms in self-driving cars.
- Model Checking: Model checking is a formal verification technique that systematically explores all possible states of a system to check whether it satisfies a given property.
- Theorem Proving: Theorem proving involves using mathematical reasoning to prove that a system satisfies a given property.
- Ensuring Correctness: Formal verification can provide a high degree of confidence that the software control algorithms are correct and will behave as expected in all possible scenarios.
5.3 Challenges in Using Mathematical Logic
Despite its potential benefits, using mathematical logic to improve self-driving car safety also presents several challenges:
- Complexity: Specifying and verifying complex systems can be challenging and time-consuming.
- Scalability: Formal verification techniques may not scale well to large and complex systems.
- Expertise: Using mathematical logic requires specialized knowledge and expertise.
CAR-REMOTE-REPAIR.EDU.VN provides training and resources to help technicians overcome these challenges and effectively use mathematical logic to improve the safety and reliability of self-driving cars.
6. What Are the Testing Methods for Self-Driving Car Software?
Testing is crucial for ensuring the safety and reliability of self-driving car software. Various testing methods are used to evaluate the performance of perception, planning, and control algorithms.
6.1 Simulation Testing
Simulation testing involves running the software in a virtual environment that simulates real-world driving conditions. This allows developers to test the software in a wide range of scenarios without risking real-world accidents.
- Scenario Generation: Creating realistic driving scenarios that include different road types, traffic conditions, weather conditions, and unexpected events.
- Sensor Modeling: Simulating the behavior of sensors such as cameras, lidar, and radar, including noise and limitations.
- Hardware-in-the-Loop (HIL) Testing: Integrating the software with real hardware components, such as sensors and actuators, to test the system in a more realistic environment.
6.2 Field Testing
Field testing involves running the software in real-world driving conditions. This allows developers to evaluate the performance of the software in a realistic environment and identify any issues that may not have been apparent in simulation testing.
- Controlled Environments: Testing the software in controlled environments, such as proving grounds or closed courses, to ensure safety.
- Public Roads: Testing the software on public roads with safety drivers who can take control of the vehicle if necessary.
- Data Collection: Collecting data from sensors and logging system behavior to analyze performance and identify areas for improvement.
6.3 Regression Testing
Regression testing involves re-running previously passed tests after making changes to the software. This ensures that the changes have not introduced any new bugs or regressions.
- Automated Testing: Automating the testing process to ensure that tests are run consistently and efficiently.
- Continuous Integration: Integrating testing into the development process to ensure that tests are run frequently and that any issues are identified early.
6.4 Challenges in Testing
Testing self-driving car software presents several challenges:
- Coverage: Ensuring that the tests cover a wide range of scenarios and potential failure modes.
- Realism: Simulating realistic driving conditions and sensor behavior.
- Validation: Validating the results of the tests and ensuring that they accurately reflect the performance of the software.
CAR-REMOTE-REPAIR.EDU.VN offers specialized training to address these testing challenges, equipping technicians with the skills to develop and execute effective testing strategies for self-driving car software.
7. What Are the Ethical Considerations of Software Control Algorithms?
The development and deployment of software control algorithms in self-driving cars raise several ethical considerations that must be addressed to ensure that these systems are used responsibly and for the benefit of society.
7.1 Safety
Safety is the paramount ethical consideration in the development of self-driving cars. The software control algorithms must be designed to prioritize safety and minimize the risk of accidents.
- Risk Assessment: Conducting thorough risk assessments to identify potential hazards and develop strategies to mitigate them.
- Redundancy: Implementing redundant systems to ensure that the vehicle can continue to operate safely even if one or more components fail.
- Fail-Safe Mechanisms: Designing fail-safe mechanisms that will bring the vehicle to a safe stop in the event of a critical failure.
7.2 Algorithmic Bias
Algorithmic bias refers to the potential for software control algorithms to make decisions that are unfair or discriminatory based on factors such as race, gender, or socioeconomic status.
- Data Diversity: Ensuring that the data used to train the algorithms is diverse and representative of the population as a whole.
- Bias Detection: Developing methods to detect and mitigate bias in the algorithms.
- Transparency: Providing transparency into the decision-making process of the algorithms to allow for scrutiny and accountability.
7.3 Privacy
Self-driving cars collect vast amounts of data about their surroundings and the behavior of their occupants. This data must be protected to ensure the privacy of individuals.
- Data Minimization: Collecting only the data that is necessary for the safe and efficient operation of the vehicle.
- Data Anonymization: Anonymizing the data to prevent it from being linked to individuals.
- Data Security: Implementing robust security measures to protect the data from unauthorized access.
7.4 Accountability
Accountability refers to the responsibility for the decisions made by self-driving cars. It is important to establish clear lines of accountability to ensure that individuals or organizations can be held responsible for any harm caused by these systems.
- Legal Frameworks: Developing legal frameworks that address the liability for accidents caused by self-driving cars.
- Insurance: Providing insurance coverage to protect individuals from financial losses resulting from accidents caused by self-driving cars.
- Ethical Guidelines: Establishing ethical guidelines for the development and deployment of self-driving cars.
7.5 Challenges in Ethical Considerations
Addressing the ethical considerations of software control algorithms presents several challenges:
- Complexity: The ethical issues are complex and multifaceted, requiring input from a wide range of stakeholders.
- Uncertainty: There is uncertainty about the potential impacts of self-driving cars on society.
- Conflicting Values: Different stakeholders may have conflicting values and priorities.
CAR-REMOTE-REPAIR.EDU.VN offers training and resources to help technicians understand and address these ethical considerations, ensuring that they can contribute to the responsible development and deployment of self-driving cars.
8. How Do Over-the-Air (OTA) Updates Affect Software in Self-Driving Cars?
Over-the-Air (OTA) updates are essential for maintaining and improving the software in self-driving cars. OTA updates allow developers to remotely update the software, fix bugs, and add new features without requiring the vehicle to be taken to a service center.
8.1 Benefits of OTA Updates
OTA updates offer several benefits for self-driving cars:
- Timely Bug Fixes: OTA updates allow developers to quickly fix bugs and security vulnerabilities, improving the safety and reliability of the vehicle.
- New Features: OTA updates can add new features and capabilities to the vehicle, enhancing the driving experience and extending the life of the vehicle.
- Performance Improvements: OTA updates can improve the performance of the software, making the vehicle more efficient and responsive.
- Cost Savings: OTA updates can save time and money by eliminating the need for physical service visits.
8.2 Security Considerations
OTA updates also raise security considerations. It is important to ensure that the updates are secure and cannot be compromised by malicious actors.
- Authentication: Authenticating the updates to ensure that they are coming from a trusted source.
- Encryption: Encrypting the updates to prevent them from being intercepted and modified.
- Integrity Checks: Performing integrity checks to ensure that the updates have not been tampered with.
8.3 Challenges in OTA Updates
Implementing OTA updates in self-driving cars presents several challenges:
- Reliability: Ensuring that the updates are delivered reliably and without interrupting the vehicle’s operation.
- Security: Protecting the updates from unauthorized access and modification.
- Compatibility: Ensuring that the updates are compatible with the vehicle’s hardware and software.
CAR-REMOTE-REPAIR.EDU.VN offers specialized training to address these OTA update challenges, equipping technicians with the skills to manage and maintain the software in self-driving cars effectively.
9. What Training is Available for Automotive Technicians on Self-Driving Car Software?
As self-driving technology continues to evolve, it’s crucial for automotive technicians to stay ahead of the curve. CAR-REMOTE-REPAIR.EDU.VN offers specialized training programs designed to equip technicians with the skills and knowledge needed to diagnose, repair, and maintain the complex software systems in autonomous vehicles.
9.1 Comprehensive Curriculum
Our training programs cover a wide range of topics related to self-driving car software, including:
- Fundamentals of Autonomous Driving: Understanding the core concepts and technologies behind self-driving cars, including perception, planning, and control algorithms.
- Sensor Technologies: Learning about the different types of sensors used in self-driving cars, such as cameras, lidar, and radar, and how they work together to perceive the environment.
- Software Architecture: Exploring the software architecture of self-driving cars, including the different layers and modules that make up the system.
- Diagnostic Tools and Techniques: Mastering the diagnostic tools and techniques used to troubleshoot software issues in self-driving cars.
- OTA Updates and Maintenance: Understanding how to manage and maintain the software in self-driving cars using Over-the-Air (OTA) updates.
- Safety and Ethical Considerations: Addressing the safety and ethical considerations related to self-driving car software.
9.2 Hands-On Training
Our training programs emphasize hands-on learning, providing technicians with the opportunity to work with real-world self-driving car software and hardware. This includes:
- Simulated Environments: Using simulated environments to test and troubleshoot software issues in a safe and controlled setting.
- Hardware-in-the-Loop (HIL) Testing: Integrating the software with real hardware components to test the system in a more realistic environment.
- Real-World Case Studies: Analyzing real-world case studies to learn from past experiences and develop best practices for diagnosing and repairing self-driving car software.
9.3 Expert Instructors
Our training programs are taught by experienced instructors who are experts in the field of self-driving car technology. These instructors bring a wealth of knowledge and practical experience to the classroom, providing technicians with the insights and skills they need to succeed.
9.4 Certification Programs
Upon completion of our training programs, technicians can earn certifications that demonstrate their expertise in self-driving car software. These certifications can enhance their career prospects and provide them with a competitive edge in the job market.
CAR-REMOTE-REPAIR.EDU.VN offers a range of certification programs, including:
- Certified Autonomous Vehicle Technician (CAVT)
- Certified Autonomous Vehicle Software Specialist (CAVSS)
- Certified Autonomous Vehicle Diagnostic Expert (CAVDE)
Equip yourself with the knowledge and skills needed to thrive in the future of automotive technology. Contact CAR-REMOTE-REPAIR.EDU.VN today to learn more about our training programs and certification opportunities.
10. What are the Future Trends in Software Control Algorithms for Self-Driving Cars?
The field of software control algorithms for self-driving cars is rapidly evolving, with new technologies and approaches emerging all the time. Here are some of the key trends that are shaping the future of this field:
10.1 Artificial Intelligence (AI)
AI is playing an increasingly important role in self-driving car software, enabling vehicles to make more intelligent and adaptive decisions.
- Deep Learning: Deep learning models are being used for perception, planning, and control, allowing vehicles to learn from vast amounts of data and improve their performance over time.
- Reinforcement Learning: Reinforcement learning is being used to train vehicles to make optimal decisions in complex and dynamic environments.
- Explainable AI (XAI): XAI is focused on making AI systems more transparent and understandable, allowing humans to understand why the algorithms make certain decisions.
10.2 Edge Computing
Edge computing involves processing data closer to the source, reducing latency and improving the responsiveness of self-driving car software.
- Onboard Processing: Performing more processing onboard the vehicle, reducing the reliance on cloud connectivity.
- Sensor Fusion: Fusing data from multiple sensors onboard the vehicle to improve the accuracy and robustness of perception.
- Real-Time Control: Implementing real-time control algorithms that can respond quickly to changing conditions.
10.3 Cybersecurity
Cybersecurity is becoming increasingly important as self-driving cars become more connected and autonomous.
- Intrusion Detection: Developing systems to detect and prevent cyberattacks on self-driving cars.
- Data Encryption: Encrypting data to protect it from unauthorized access.
- Secure OTA Updates: Ensuring that OTA updates are secure and cannot be compromised by malicious actors.
10.4 Collaboration
Collaboration between different vehicles and infrastructure is becoming increasingly important for improving the safety and efficiency of self-driving cars.
- Vehicle-to-Vehicle (V2V) Communication: Allowing vehicles to communicate with each other to share information about traffic conditions, road hazards, and other relevant data.
- Vehicle-to-Infrastructure (V2I) Communication: Allowing vehicles to communicate with infrastructure such as traffic lights, road signs, and traffic management systems.
- Cooperative Driving: Enabling vehicles to cooperate with each other to perform tasks such as platooning and merging.
10.5 Challenges in Future Trends
Implementing these future trends presents several challenges:
- Complexity: Developing and integrating these advanced technologies is complex and requires specialized expertise.
- Cost: The cost of developing and deploying these technologies can be high.
- Regulation: The regulatory landscape for self-driving cars is still evolving.
CAR-REMOTE-REPAIR.EDU.VN is committed to staying at the forefront of these trends, providing technicians with the training and resources they need to succeed in the future of automotive technology.
 Machine learning algorithm detects a non-existing cyclist
Machine learning algorithm detects a non-existing cyclist
Ready to Elevate Your Skills in Automotive Technology?
Don’t let the complexities of modern vehicle technology hold you back. At CAR-REMOTE-REPAIR.EDU.VN, we offer comprehensive training programs designed to equip you with the expertise needed to thrive in the rapidly evolving automotive industry. Whether you’re looking to enhance your diagnostic skills, master remote repair techniques, or stay ahead of the curve with the latest advancements in self-driving car software, we have a course for you.
Why Choose CAR-REMOTE-REPAIR.EDU.VN?
- Expert Instructors: Learn from industry-leading professionals with years of hands-on experience.
- Cutting-Edge Curriculum: Stay up-to-date with the latest technologies and trends in automotive repair.
- Hands-On Training: Gain practical experience through real-world simulations and case studies.
- Certification Opportunities: Earn certifications that validate your skills and enhance your career prospects.
Take the Next Step Today!
Visit our website at CAR-REMOTE-REPAIR.EDU.VN to explore our course offerings and discover how we can help you achieve your professional goals. For personalized assistance, contact us via WhatsApp at +1 (641) 206-8880 or visit our location at 1700 W Irving Park Rd, Chicago, IL 60613, United States.
Don’t miss out on the opportunity to transform your career and become a leader in the automotive industry. Enroll at CAR-REMOTE-REPAIR.EDU.VN today and unlock your full potential!
FAQ: Software Control Algorithms in Self-Driving Cars
1. What are software control algorithms in self-driving cars?
Software control algorithms are the brains behind autonomous vehicles, processing sensor data, making real-time decisions, and controlling the vehicle’s movements to ensure safe navigation.
2. How do perception algorithms work in self-driving cars?
Perception algorithms interpret data from sensors like cameras, lidar, and radar to detect objects, understand scenes, and build a comprehensive model of the vehicle’s surroundings.
3. What is the role of planning algorithms in self-driving cars?
Planning algorithms use the perceived environment to determine the optimal path and driving maneuvers, ensuring the vehicle can reach its destination safely and efficiently.
4. How do control algorithms execute planned maneuvers in self-driving cars?
Control algorithms send commands to the vehicle’s actuators, such as the steering wheel, throttle, and brakes, ensuring precise and stable vehicle control, even in challenging conditions.
5. How does mathematical logic improve self-driving car safety?
Mathematical logic provides a formal framework for specifying and verifying the behavior of autonomous systems, ensuring they adhere to basic laws of physics and common-sense assumptions.
6. What are the key testing methods for self-driving car software?
Key testing methods include simulation testing, field testing, and regression testing, allowing developers to evaluate the performance of the software in various scenarios and identify potential issues.
7. What ethical considerations are important in developing software control algorithms for self-driving cars?
Important ethical considerations include safety, algorithmic bias, privacy, and accountability, ensuring that these systems are used responsibly and for the benefit of society.
8. How do Over-the-Air (OTA) updates affect software in self-driving cars?
Over-the-Air (OTA) updates allow developers to remotely update the software, fix bugs, and add new features without requiring the vehicle to be taken to a service center, ensuring timely improvements and security enhancements.
9. What training is available for automotive technicians on self-driving car software?
CAR-REMOTE-REPAIR.EDU.VN offers specialized training programs designed to equip technicians with the skills and knowledge needed to diagnose, repair, and maintain the complex software systems in autonomous vehicles.
10. What are the future trends in software control algorithms for self-driving cars?
Future trends include the increasing use of artificial intelligence (AI), edge computing, enhanced cybersecurity measures, and greater collaboration between vehicles and infrastructure to improve safety and efficiency.
